ℹ️ Skipped - page is already crawled
| Filter | Status | Condition | Details |
|---|---|---|---|
| HTTP status | PASS | download_http_code = 200 | HTTP 200 |
| Age cutoff | PASS | download_stamp > now() - 6 MONTH | 0.2 months ago |
| History drop | PASS | isNull(history_drop_reason) | No drop reason |
| Spam/ban | PASS | fh_dont_index != 1 AND ml_spam_score = 0 | ml_spam_score=0 |
| Canonical | PASS | meta_canonical IS NULL OR = '' OR = src_unparsed | Not set |
| Property | Value |
|---|---|
| URL | https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-4-laplace-transforms/ |
| Last Crawled | 2026-04-04 02:15:48 (4 days ago) |
| First Indexed | 2023-03-02 19:22:30 (3 years ago) |
| HTTP Status Code | 200 |
| Meta Title | 1.4 Laplace Transforms – Introduction to Control Systems |
| Meta Description | null |
| Meta Canonical | null |
| Boilerpipe Text | Self-Study: Review your ELE532 Notes and other resources. You can also refer to the review material on the course website.
1.4.1 Definitions
F
(
s
)
=
L
[
f
(
t
)
]
=
∫
0
+
∞
f
(
t
)
e
−
s
t
d
t
f
(
t
)
=
L
−
1
[
F
(
s
)
]
=
1
2
π
j
∫
σ
−
j
∞
σ
+
j
∞
F
(
s
)
e
s
t
d
s
1.4.1.1 Final Value Theorem
f
s
s
=
lim
t
→
∞
f
(
t
)
=
lim
s
→
0
s
F
(
s
)
1.4.1.2 Initial Value Theorem
f
0
=
lim
t
→
0
+
f
(
t
)
=
lim
s
→
∞
s
F
(
s
)
1.4.1.3 Properties of Laplace transforms
Table 1‑1 Properties of Laplace Transform
F
(
s
)
e
−
T
s
f
(
t
−
T
)
⋅
1
(
t
)
F
(
s
+
a
)
f
(
t
)
e
−
a
t
⋅
1
(
t
)
s
F
(
s
)
−
f
(
0
+
)
d
f
(
t
)
d
t
S
2
F
(
s
)
−
s
f
(
0
+
)
−
d
f
(
0
+
)
d
t
d
2
f
(
t
)
d
t
2
1
s
F
(
s
)
∫
0
+
+
∞
f
(
t
)
d
t
F
1
(
s
)
⋅
F
2
(
s
)
f
1
(
t
)
∗
f
2
(
t
)
1.4.2 Solving for System Response
Parametric models cannot be developed without math. Laws of physics describe dynamic Linear Time-Invariant (LTI) systems using ordinary differential equations. To simplify their analysis, Laplace transform is used. Consider a certain LTI (Linear Time-Invariant), SISO (Single Input Single Output) system:
Let the input – output relationship for the system be described by the following
n
th order differential equation:
d
n
y
d
t
n
+
a
n
−
1
d
n
−
1
y
d
t
n
−
1
+
.
.
.
+
a
1
d
y
d
t
+
a
0
y
=
b
m
d
m
u
d
t
m
+
b
m
−
1
d
m
−
1
u
d
t
m
−
1
+
.
.
.
+
b
1
d
u
d
t
+
b
0
u
The equation parameters relate to physical aspects of the system. The time domain description of systems is not convenient for quick paper-and-pencil speculations. To simplify math, Classical Control uses a Laplace Transform system description, which converts the differential equations into their algebraic equivalents in the s-domain. The solution for y(t) can then be found using inverse Laplace transformation to Y(s).
1.4.3 Two Transfer Functions Models: TF and ZPK
In the transform domain, the input-output relationship of the system is defined by a transfer function G(s), defined as a ratio of the Laplace transform of the system output signal y(t), to the Laplace transform of the system input signal u(t), with any initial conditions in the system set to zero. The system transfer function G(s) can be thought of as a dynamic gain of the system:
Block diagrams are used to graphically represent systems and their components, as shown above. In order to find G(s), a Laplace transform of the system differential equation in Equation 1‑4 is taken:
s
n
Y
(
s
)
+
a
n
−
1
s
n
−
1
Y
(
s
)
+
.
.
.
+
a
1
s
Y
(
s
)
+
a
0
Y
(
s
)
=
b
m
s
m
U
(
s
)
+
b
m
−
1
s
m
−
1
U
(
s
)
+
.
.
.
+
b
1
s
U
(
s
)
+
b
0
U
(
s
)
G
(
s
)
=
Y
(
s
)
U
(
s
)
=
b
m
s
m
+
b
m
−
1
s
m
−
1
+
.
.
.
+
b
1
s
+
b
0
s
n
+
a
n
−
1
s
n
−
1
+
.
.
.
+
a
1
s
+
a
0
Equation 1‑5
Transfer functions are ratios of polynomials written in terms of the s-operator. The resulting function in Equation 1‑5 is a ratio of two polynomials, N(s) and D(s):
G
(
s
)
=
N
(
s
)
D
(
s
)
=
b
m
s
m
+
b
m
−
1
s
m
−
1
+
.
.
.
+
b
1
s
+
b
0
s
n
+
a
n
−
1
s
n
−
1
+
.
.
.
+
a
1
s
+
a
0
Equation 1‑6
Roots of the numerator polynomial of G(s) in Equation 1‑6 are called system zeros,
z
i
, and roots of the denominator polynomial are called system poles,
p
i
.
Note that in MATLAB a transfer function object in a polynomial form can be created by using the “tf” command. For example, consider the following transfer function in the polynomial ratio form:
G
(
s
)
=
Y
(
s
)
U
(
s
)
=
2
s
+
20
s
2
+
4
s
+
3
The same transfer function
G
(
s
)
can be represented in the so-called ZPK form (factorized form):
G
(
s
)
=
K
∏
i
m
(
s
−
z
i
)
∏
j
n
(
s
−
p
j
)
Equation 1‑7
K
is a multiplier. It is important to see the difference between
K
and
K
dc, which denotes the DC gain of the system (i.e. s=0):
K
d
c
=
G
(
0
)
=
N
(
0
)
D
(
0
)
=
b
0
a
0
=
K
∏
i
m
(
−
z
i
)
∏
j
n
(
−
p
j
)
Equation 1‑8
Our transfer function can be factorized and the multiplier gain K is equal to 2:
G
(
s
)
=
Y
(
s
)
U
(
s
)
=
2
(
s
+
10
)
(
s
+
1
)
(
s
+
3
)
The DC gain of our transfer function is:
K
D
C
=
G
(
0
)
=
2
(
10
)
(
1
)
(
3
)
=
6.667
In MATLAB the transfer function can be shown in a factorized form by using the “zpk” command, and the DC gain can be found using “dcgain” command:
In MATLAB the “zpk” command can be used to create a transfer function object in a ZPK form, and “tf” command to convert it to a polynomial form.
Locations of the system poles and zeros can be presented graphically as the so-called Pole-Zero Map.
1.4.4 Partial Fractions Technique
If a certain control system is described by a transfer function G(s), the system response can be found as
Y
(
s
)
=
U
(
s
)
⋅
G
(
s
)
. Since Laplace Transform Tables do not provide exhaustive solutions, a technique of a Partial Fractions Expansion is used to find inverse Laplace Transforms for various time functions – see a table of basic Laplace – Time Domain Function pair shown in Table 1‑2.
1.4.4.1 Residues – Distinct Roots Case
Y
(
s
)
=
N
(
s
)
∏
i
n
(
s
−
p
i
)
=
N
(
s
)
D
(
s
)
Y
(
s
)
=
K
1
s
−
p
1
+
K
2
s
−
p
2
+
.
.
.
+
K
n
s
−
p
n
Equation 1‑9
K
1
=
N
(
s
)
(
s
−
p
1
)
D
(
s
)
|
s
=
p
1
K
2
=
N
(
s
)
(
s
−
p
2
)
D
(
s
)
|
s
=
p
2
⋮
K
n
=
N
(
s
)
(
s
−
p
n
)
D
(
s
)
|
s
=
p
n
Equation 1‑10
1.4.4.2 Residues – Multiple Roots Case
This is the case for Laplace Transforms with multiple powers of some roots. Assume multiplicity of
m
for root
r
1
:
Y
(
s
)
=
N
(
s
)
∏
i
n
(
s
−
p
i
)
=
N
(
s
)
D
(
s
)
Y
(
s
)
=
K
1
s
−
r
1
+
K
2
(
s
−
r
1
)
2
+
.
.
.
+
K
m
(
s
−
r
1
)
m
+
.
.
.
+
K
n
s
−
p
n
Residues for distinct roots calculated as before:
K
m
+
1
=
N
(
s
)
(
s
−
p
1
)
D
(
s
)
|
s
=
p
m
+
1
⋮
K
n
=
N
(
s
)
(
s
−
p
n
)
D
(
s
)
|
s
=
p
n
To calculate residues for a multiple root, multiply both sides of Equation 1‑12 by
(
s
−
r
1
)
m
and substitute the value of the root
r
1
:
N
(
s
)
D
(
s
)
=
K
1
s
−
r
1
+
K
2
(
s
−
r
1
)
2
+
.
.
.
+
K
m
(
s
−
r
1
)
m
+
.
.
.
+
K
n
s
−
p
n
N
(
s
)
(
s
−
r
1
)
m
D
(
s
)
=
K
1
(
s
−
r
1
)
m
s
−
r
1
+
K
2
(
s
−
r
1
)
m
(
s
−
r
1
)
2
+
.
.
.
+
K
m
+
.
.
.
+
K
n
(
s
−
r
1
)
m
s
−
p
n
N
(
s
)
(
s
−
r
1
)
m
D
(
S
)
|
s
=
r
1
=
K
m
To calculate the residues for the second multiplicity of the root
r
1
:
d
d
s
(
N
(
s
)
(
s
−
r
1
)
m
D
(
s
)
)
=
d
d
s
(
K
1
(
s
−
r
1
)
m
s
−
r
1
+
K
2
(
s
−
r
1
)
m
(
s
−
r
1
)
2
+
.
.
.
+
K
m
+
.
.
.
+
K
n
(
s
−
r
1
)
m
s
−
p
n
)
d
d
s
(
N
(
s
)
(
s
−
r
1
)
m
D
(
s
)
)
|
s
=
r
1
=
0
+
.
.
.
+
K
m
−
1
+
0
+
.
.
.
+
0
Laplace Transform
Time Domain Function
1
σ
(
t
)
1
s
1
(
t
)
1
s
2
t
⋅
1
(
t
)
1
s
k
+
1
t
k
k
!
1
(
t
)
1
s
+
a
e
−
a
t
⋅
1
(
t
)
1
(
s
+
a
)
2
t
e
−
a
t
⋅
1
(
t
)
a
s
(
s
+
a
)
(
1
−
e
−
a
t
)
⋅
(
t
)
a
s
2
+
a
2
s
i
n
(
a
t
)
⋅
1
(
t
)
s
s
2
+
a
2
c
o
s
(
a
t
)
⋅
1
(
t
)
s
+
a
(
s
+
a
)
2
+
b
2
e
−
a
t
⋅
c
o
s
(
b
t
)
⋅
1
(
t
)
b
(
s
+
a
)
2
+
b
2
e
−
a
t
⋅
s
i
n
(
b
t
)
⋅
1
(
t
)
a
2
+
b
2
s
[
(
s
+
a
)
2
+
b
2
]
(
1
−
e
−
a
t
⋅
(
c
o
s
(
b
t
)
+
a
b
⋅
s
i
n
(
b
t
)
)
)
⋅
1
(
t
)
ω
n
2
s
2
+
2
ζ
ω
n
s
+
ω
n
2
ω
n
1
−
ζ
2
e
−
ζ
ω
n
t
⋅
s
i
n
(
ω
n
1
−
ζ
2
t
)
⋅
1
(
t
)
ω
n
2
s
(
s
2
+
2
ζ
ω
n
s
+
ω
n
2
)
(
1
−
1
1
−
ζ
2
e
−
ζ
ω
n
t
⋅
s
i
n
(
ω
n
1
−
ζ
2
t
+
c
o
s
−
1
(
ζ
)
)
)
⋅
1
(
t
)
To calculate the residues for the remaining multiplicities of the root r1, use this recursive formula:
1
2
!
d
2
d
s
2
(
N
(
s
)
(
s
−
r
1
)
m
D
(
s
)
)
|
s
=
r
1
=
K
m
−
2
1
(
m
−
1
)
!
d
m
−
1
d
s
m
−
1
(
N
(
s
)
(
s
−
r
1
)
m
D
(
s
)
)
|
s
=
r
1
=
K
m
1.4.5 Examples
1.4.5.1 Example
Consider a system described by the following transfer function and find the pole-zero model of the transfer function and its DC gain.
G
(
s
)
=
2
s
+
3
S
2
+
3
s
+
2
HINT: Use MATLAB software to check your results in this, and the remaining examples in this section.
1.4.5.2 Example
Consider a system described by the following transfer function:
5
s
3
+
30
s
2
+
55
s
+
30
s
5
+
14
s
4
+
62
s
3
+
110
s
2
+
153
s
+
140
Find the pole-zero model of the transfer function and its DC gain.
HINT: Use Matlab.
1.4.5.3 Example
A certain LTI system is described as having one zero and four poles, as follows:
z
1
=
−
2.2
,
p
1
=
−
1
+
j
1
,
p
2
=
−
1
−
j
1
,
p
3
=
−
10
,
p
4
=
−
2
,
It is also recorded that the system has a DC gain of 5.
Write the complete transfer function of the system in a ZPK form.
1.4.5.4 Example
Consider a system described by the following transfer function:
G
(
s
)
=
10
s
2
+
30
s
+
20
s
4
+
14
s
3
+
68
s
2
+
130
s
+
75
Create an LTI object representing this system using both the transfer function model and the zero-pole-gain model. Extract zero-pole-gain data and numerator-denominator from the LTI object. Obtain the system dc gain and the pole-zero map of the transfer function. Obtain a minimum realization of this system. Use MATLAB to solve this problem.
1.4.5.5 Example
Consider a system described by the following transfer function:
G
(
s
)
=
Y
(
s
)
U
(
s
)
=
s
2
+
3
s
+
3
s
3
+
6
s
2
+
11
s
+
6
Find an analytical expression for an impulse response of the system.
1.4.5.6 Example
A certain control system is described by the following transfer function:
G
(
s
)
=
Y
(
s
)
U
(
s
)
=
2
s
+
8
s
3
+
5
s
2
+
8
s
+
4
Find an analytical expression for a step response of the system.
1.4.5.7 Example
A certain control system is described by the following closed loop transfer function:
G
c
l
(
s
)
=
45
(
s
+
6
)
(
s
2
+
65
s
+
354
)
s
Find an analytical expression for a step response of the system – note the integrator term in the denominator!
1.4.5.8 Example
A certain control system is described by the following closed loop transfer function:
G
c
l
(
s
)
=
45
(
s
+
6
)
s
3
+
20
s
2
+
129
s
+
270
One of the closed loop poles is at -5. Find an analytical expression for a step response of the system. |
| Markdown | [Skip to content](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-4-laplace-transforms/#content)
[](https://pressbooks.library.torontomu.ca/)
[Toggle Menu](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-4-laplace-transforms/#navigation)
Primary Navigation
- [Home](https://pressbooks.library.torontomu.ca/controlsystems)
- [Read](https://pressbooks.library.torontomu.ca/controlsystems/front-matter/introduction/)
- [Sign in](https://pressbooks.library.torontomu.ca/controlsystems/wp-login.php?redirect_to=https%3A%2F%2Fpressbooks.library.torontomu.ca%2Fcontrolsystems%2Fchapter%2F1-4-laplace-transforms%2F)
Book Contents Navigation
Contents
1. [Introduction](https://pressbooks.library.torontomu.ca/controlsystems/front-matter/introduction/)
2. [Acknowledgements](https://pressbooks.library.torontomu.ca/controlsystems/front-matter/acknowledgements/)
3. [Foreword](https://pressbooks.library.torontomu.ca/controlsystems/front-matter/foreword/)
4. Chapter 1
1. [1\.1 Definitions: System and Control](https://pressbooks.library.torontomu.ca/controlsystems/chapter/definitions-system-control/)
2. [1\.2 Types of Control Actions](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-2-types-of-control-actions/)
3. [1\.3 Control Objectives](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-3-control-objectives/)
4. [1\.4 Laplace Transforms](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-4-laplace-transforms/)
5. [1\.5 Transfer Function Representations of Simple Physical Systems](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-5-1-5transfer-function-representations-of-simple-physical-systems/)
6. [1\.6 Basic Block Diagrams](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-6-basic-block-diagrams/)
5. Chapter 2
1. [2\.1 General Definition of Stability](https://pressbooks.library.torontomu.ca/controlsystems/chapter/2-1-general-definition-of-stability/)
2. [2\.2 Locations in s-Plane vs. Time Response](https://pressbooks.library.torontomu.ca/controlsystems/chapter/2-2-locations-in-s-plane-vs-time-response/)
3. [2\.3 Stability in s-Domain: The Routh-Hurwitz Criterion of Stability](https://pressbooks.library.torontomu.ca/controlsystems/chapter/2-3stability-in-s-domain-the-routh-hurwitz-criterion-of-stability/)
4. [2\.4 Determining Stable Range for Proportional Controller Operations](https://pressbooks.library.torontomu.ca/controlsystems/chapter/2-4determining-stable-range-for-proportional-controller-operations/)
5. [2\.5 Relative Stability - Gain Margin](https://pressbooks.library.torontomu.ca/controlsystems/chapter/2-5-relative-stability-gain-margin/)
6. [2\.6 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/2-6-examples/)
6. Chapter 3
1. [3\.1 Basic Block Diagrams Continued](https://pressbooks.library.torontomu.ca/controlsystems/chapter/3-1basic-block-diagrams-continued/)
2. [3\.2 Signal Flow Graphs](https://pressbooks.library.torontomu.ca/controlsystems/chapter/signal-flow-graphs/)
3. [3\.3 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/3-3-examples/)
7. Chapter 4
1. [4\.1 Introduction](https://pressbooks.library.torontomu.ca/controlsystems/chapter/4-1-introduction/)
2. [4\.2 Standard Time Inputs](https://pressbooks.library.torontomu.ca/controlsystems/chapter/4-2-standard-time-inputs/)
3. [4\.3 Step response specifications - Definitions](https://pressbooks.library.torontomu.ca/controlsystems/chapter/4-3-step-response-specifications-definitions/)
4. [4\.4 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/4-4-examples/)
8. Chapter 5
1. [5\.1 Equivalent Unit Feedback Loop](https://pressbooks.library.torontomu.ca/controlsystems/chapter/5-1-equivalent-unit-feedback-loop/)
2. [5\.2 Steady State Error Analysis in an Equivalent Unit Feedback Loop](https://pressbooks.library.torontomu.ca/controlsystems/chapter/5-2steady-state-error-analysis-in-an-equivalent-unit-feedback-loop/)
3. [5\.3 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/5-3-examples/)
9. Chapter 6
1. [6\.1 First order systems](https://pressbooks.library.torontomu.ca/controlsystems/chapter/6-1-first-order-systems/)
2. [6\.2 Second Order Overdamped Systems](https://pressbooks.library.torontomu.ca/controlsystems/chapter/6-2second-order-overdamped-systems/)
10. Chapter 7
1. [7\.1 Second Order Underdamped Systems](https://pressbooks.library.torontomu.ca/controlsystems/chapter/7-1second-order-underdamped-systems/)
2. [7\.2 Response Specifications for the Second Order Underdamped System](https://pressbooks.library.torontomu.ca/controlsystems/chapter/7-2response-specifications-for-the-second-order-underdamped-system/)
3. [7\.3 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/7-3-examples/)
11. Chapter 8
1. [8\.1 Systems with Delay](https://pressbooks.library.torontomu.ca/controlsystems/chapter/8-1-systems-with-delay/)
2. [8\.2 Minimum Realizations and Reduced Order Models - Part 1](https://pressbooks.library.torontomu.ca/controlsystems/chapter/8-2minimum-realizations-and-reduced-order-models-part-1/)
3. [8\.3 Dominant System Dynamics and Reduced Order Models - Part 2](https://pressbooks.library.torontomu.ca/controlsystems/chapter/8-3dominant-system-dynamics-and-reduced-order-models-part-2/)
4. [8\.4 The Effect of an Additional Pole on the 2nd Order System Response](https://pressbooks.library.torontomu.ca/controlsystems/chapter/8-4the-effect-of-an-additional-pole-on-the-2nd-order-system-response/)
5. [8\.5 The Effect of an additional Zero on the 2nd Order System Response](https://pressbooks.library.torontomu.ca/controlsystems/chapter/8-5the-effect-of-an-additional-zero-on-the-2nd-order-system-response/)
6. [8\.6 The Effect of a Non-Minimum Phase Zero on the 2nd Order System Response](https://pressbooks.library.torontomu.ca/controlsystems/chapter/8-6the-effect-of-a-non-minimum-phase-zero-on-the-2nd-order-system-response/)
7. [8\.7 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/8-7examples/)
12. Chapter 9
1. [9\.1 Introduction](https://pressbooks.library.torontomu.ca/controlsystems/chapter/9-1introduction/)
2. [9\.2 Proportional Control](https://pressbooks.library.torontomu.ca/controlsystems/chapter/9-2proportional-control/)
3. [9\.3 Proportional + Derivative Control](https://pressbooks.library.torontomu.ca/controlsystems/chapter/9-3proportional-derivative-control/)
4. [9\.4 Proportional + Integral Control](https://pressbooks.library.torontomu.ca/controlsystems/chapter/9-4proportional-integral-control/)
5. [9\.5 PID Controller and Its Tuning](https://pressbooks.library.torontomu.ca/controlsystems/chapter/9-5pid-controller-and-its-tuning/)
6. [9\.6 Effect of PID Controller Modes on System Stability](https://pressbooks.library.torontomu.ca/controlsystems/chapter/9-6effect-of-pid-controller-modes-on-system-stability/)
7. [9\.7 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/9-7examples/)
13. Chapter 10
1. [10\.1 Introduction](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-1introduction/)
2. [10\.2 Evans' Root Locus Construction Rules - Introduction](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-2evans-root-locus-construction-rules-introduction/)
3. [10\.3 Evans Root Locus Construction Rule \# 1: Beginning, End and Symmetry](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-3evans-root-locus-construction-rule-1-beginning-end-and-symmetry/)
4. [10\.4 Evans Root Locus Construction Rule \# 2: Segments of Root Locus on Real Axis](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-4evans-root-locus-construction-rule-2-segments-of-root-locus-on-real-axis/)
5. [10\.5 Evans Root Locus Construction Rule \# 3: Asymptotic Angles and Centroid](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-5evans-root-locus-construction-rule-3-asymptotic-angles-and-centroid/)
6. [10\.6 Evans Root Locus Construction Rule \# 4: Break-Away and Break-In Points](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-6-evans-root-locus-construction-rule-4break-away-and-break-in-points/)
7. [10\.7 Evans Root Locus Construction Rule \# 5: Crossover with Imaginary Axis](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-7-evans-root-locus-construction-rule-5-crosspver-with-imaginary-axis/)
8. [10\.8 Evans Root Locus Construction Rule \#6: Angles of Departures/Arrivals at Complex Poles/Zeros](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-8-evans-root-locus-construction-rule-6-angles-of-departures-arrivals-at-complex-poles-zeros/)
9. [10\.9 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/10-9-examples/)
14. Chapter 11
1. [11\.1 Gain Margin from Bode Plot](https://pressbooks.library.torontomu.ca/controlsystems/chapter/11-1-gain-margin-from-bode-plot/)
2. [11\.2 Definition of Phase Margin](https://pressbooks.library.torontomu.ca/controlsystems/chapter/11-2definition-of-phase-margin/)
3. [11\.3 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/11-3-examples/)
15. Chapter 12
1. [12\.1 Model from Closed Loop Frequency Response](https://pressbooks.library.torontomu.ca/controlsystems/chapter/12-1-model-from-closed-loop-frequency-response/)
2. [12\.2 Model from Open Loop Frequency Response](https://pressbooks.library.torontomu.ca/controlsystems/chapter/12-2-model-from-open-loop-frequency-response/)
3. [12\.3 Summary](https://pressbooks.library.torontomu.ca/controlsystems/chapter/12-3summary/)
4. [12\.4 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/12-4examples/)
16. Chapter 13
1. [13\.1 Basic Rules - Summary](https://pressbooks.library.torontomu.ca/controlsystems/chapter/13-1-basic-rules-summary/)
2. [13\.2 Lead Controller](https://pressbooks.library.torontomu.ca/controlsystems/chapter/13-2lead-controller/)
3. [13\.3 Lead Controller Design – Solved Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/13-3-lead-controller-design-solved-examples/)
4. [13\.4 Lag Controller](https://pressbooks.library.torontomu.ca/controlsystems/chapter/13-4-lag-controller/)
5. [13\.5 Lag Controller Design – Solved Example 1](https://pressbooks.library.torontomu.ca/controlsystems/chapter/13-5lag-controller-design-solved-example-1/)
6. [13\.6 Lead-Lag Controller](https://pressbooks.library.torontomu.ca/controlsystems/chapter/13-6lead-lag-controller/)
7. [13\.7 Examples](https://pressbooks.library.torontomu.ca/controlsystems/chapter/13-7examples/)
17. Chapter 14
1. [14\.1 Why We Need Another Criterion of Stability](https://pressbooks.library.torontomu.ca/controlsystems/chapter/14-1-why-we-need-another-criterion-of-stability/)
2. [14\.2 Polar Plots Revisited](https://pressbooks.library.torontomu.ca/controlsystems/chapter/14-2-polar-plots-revisited/)
3. [14\.3 Solved Examples for Polar Plots](https://pressbooks.library.torontomu.ca/controlsystems/chapter/14-3-solved-examples-for-polar-plots/)
4. [14\.4 Gain and Phase Margins vs. Polar Plots](https://pressbooks.library.torontomu.ca/controlsystems/chapter/14-4-1-gain-margin-from-polar-plot/)
5. [14\.5 Concept of Mapping](https://pressbooks.library.torontomu.ca/controlsystems/chapter/14-5-concept-of-mapping/)
6. [14\.6 Cauchy's Mapping Theorem](https://pressbooks.library.torontomu.ca/controlsystems/chapter/14-6-cauchys-mapping-theorem/)
7. [14\.7 Solved Examples of Nyquist Stability Criterion](https://pressbooks.library.torontomu.ca/controlsystems/chapter/14-7-solved-examples-of-nyquist-stability-criterion/)
# [Introduction to Control Systems](https://pressbooks.library.torontomu.ca/controlsystems/)
Chapter 1
# 1\.4 Laplace Transforms
Self-Study: Review your ELE532 Notes and other resources. You can also refer to the review material on the course website.
### **1\.4.1 Definitions**
| |
|---|
| F(s)\=L\[f(t)\]\=∫\+∞0f(t)e−stdt F ( s ) \= L \[ f ( t ) \] \= ∫ 0 \+ ∞ f ( t ) e − s t d t f(t)\=L−1\[F(s)\]\=12πj∫σ\+j∞σ−j∞F(s)estds f ( t ) \= L − 1 \[ F ( s ) \] \= 1 2 π j ∫ σ − j ∞ σ \+ j ∞ F ( s ) e s t d s |
#### **1\.4.1.1 Final Value Theorem**
| |
|---|
| fss\=limt→∞f(t)\=lims→0sF(s) f s s \= lim t → ∞ f ( t ) \= lim s → 0 s F ( s ) |
#### **1\.4.1.2 Initial Value Theorem**
| |
|---|
| f0\=limt→0\+f(t)\=lims→∞sF(s) f 0 \= lim t → 0 \+ f ( t ) \= lim s → ∞ s F ( s ) |
#### **1\.4.1.3 Properties of Laplace transforms**
| |
|---|
| F(s)e−Ts F ( s ) e − T s |
### **1\.4.2 Solving for System Response**
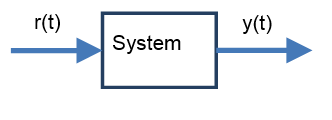
Parametric models cannot be developed without math. Laws of physics describe dynamic Linear Time-Invariant (LTI) systems using ordinary differential equations. To simplify their analysis, Laplace transform is used. Consider a certain LTI (Linear Time-Invariant), SISO (Single Input Single Output) system:
Let the input – output relationship for the system be described by the following *n*th order differential equation:
| |
|---|
| dnydtn\+an−1dn−1ydtn−1\+...\+a1dydt\+a0y\=bmdmudtm\+bm−1dm−1udtm−1\+...\+b1dudt\+b0u d n y d t n \+ a n − 1 d n − 1 y d t n − 1 \+ . . . \+ a 1 d y d t \+ a 0 y \= b m d m u d t m \+ b m − 1 d m − 1 u d t m − 1 \+ . . . \+ b 1 d u d t \+ b 0 u |
The equation parameters relate to physical aspects of the system. The time domain description of systems is not convenient for quick paper-and-pencil speculations. To simplify math, Classical Control uses a Laplace Transform system description, which converts the differential equations into their algebraic equivalents in the s-domain. The solution for y(t) can then be found using inverse Laplace transformation to Y(s).
### **1\.4.3 Two Transfer Functions Models: TF and ZPK**
In the transform domain, the input-output relationship of the system is defined by a transfer function G(s), defined as a ratio of the Laplace transform of the system output signal y(t), to the Laplace transform of the system input signal u(t), with any initial conditions in the system set to zero. The system transfer function G(s) can be thought of as a dynamic gain of the system:
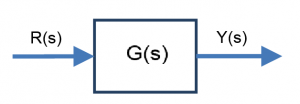
Block diagrams are used to graphically represent systems and their components, as shown above. In order to find G(s), a Laplace transform of the system differential equation in Equation 1‑4 is taken:
| |
|---|
| snY(s)\+an−1sn−1Y(s)\+...\+a1sY(s)\+a0Y(s)\=bmsmU(s)\+bm−1sm−1U(s)\+...\+b1sU(s)\+b0U(s) s n Y ( s ) \+ a n − 1 s n − 1 Y ( s ) \+ . . . \+ a 1 s Y ( s ) \+ a 0 Y ( s ) \= b m s m U ( s ) \+ b m − 1 s m − 1 U ( s ) \+ . . . \+ b 1 s U ( s ) \+ b 0 U ( s ) G(s)\=Y(s)U(s)\=bmsm\+bm−1sm−1\+...\+b1s\+b0sn\+an−1sn−1\+...\+a1s\+a0 G ( s ) \= Y ( s ) U ( s ) \= b m s m \+ b m − 1 s m − 1 \+ . . . \+ b 1 s \+ b 0 s n \+ a n − 1 s n − 1 \+ . . . \+ a 1 s \+ a 0 |
Transfer functions are ratios of polynomials written in terms of the s-operator. The resulting function in Equation 1‑5 is a ratio of two polynomials, N(s) and D(s):
| |
|---|
| G(s)\=N(s)D(s)\=bmsm\+bm−1sm−1\+...\+b1s\+b0sn\+an−1sn−1\+...\+a1s\+a0 G ( s ) \= N ( s ) D ( s ) \= b m s m \+ b m − 1 s m − 1 \+ . . . \+ b 1 s \+ b 0 s n \+ a n − 1 s n − 1 \+ . . . \+ a 1 s \+ a 0 |
Roots of the numerator polynomial of G(s) in Equation 1‑6 are called system zeros, zi z i, and roots of the denominator polynomial are called system poles, pi p i.
MATLAB Enabled
Note that in MATLAB a transfer function object in a polynomial form can be created by using the “tf” command. For example, consider the following transfer function in the polynomial ratio form:
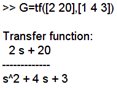
G(s)\=Y(s)U(s)\=2s\+20s2\+4s\+3
G
(
s
)
\=
Y
(
s
)
U
(
s
)
\=
2
s
\+
20
s
2
\+
4
s
\+
3
The same transfer function G(s) G ( s ) can be represented in the so-called ZPK form (factorized form):
| |
|---|
| G(s)\=K∏mi(s−zi)∏nj(s−pj) G ( s ) \= K ∏ i m ( s − z i ) ∏ j n ( s − p j ) |
*K* is a multiplier. It is important to see the difference between *K* and *K*dc, which denotes the DC gain of the system (i.e. s=0):
| |
|---|
| Kdc\=G(0)\=N(0)D(0)\=b0a0\=K∏mi(−zi)∏nj(−pj) K d c \= G ( 0 ) \= N ( 0 ) D ( 0 ) \= b 0 a 0 \= K ∏ i m ( − z i ) ∏ j n ( − p j ) |
Our transfer function can be factorized and the multiplier gain K is equal to 2:
| |
|---|
| G(s)\=Y(s)U(s)\=2(s\+10)(s\+1)(s\+3) G ( s ) \= Y ( s ) U ( s ) \= 2 ( s \+ 10 ) ( s \+ 1 ) ( s \+ 3 ) |
The DC gain of our transfer function is:
| |
|---|
| KDC\=G(0)\=2(10)(1)(3)\=6\.667 K D C \= G ( 0 ) \= 2 ( 10 ) ( 1 ) ( 3 ) \= 6\.667 |

In MATLAB the transfer function can be shown in a factorized form by using the “zpk” command, and the DC gain can be found using “dcgain” command:
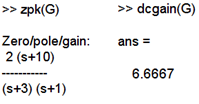

In MATLAB the “zpk” command can be used to create a transfer function object in a ZPK form, and “tf” command to convert it to a polynomial form.
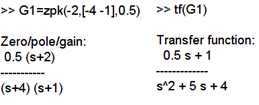
Locations of the system poles and zeros can be presented graphically as the so-called Pole-Zero Map.
### **1\.4.4 Partial Fractions Technique**
If a certain control system is described by a transfer function G(s), the system response can be found as Y(s)\=U(s)⋅G(s) Y ( s ) \= U ( s ) ⋅ G ( s ). Since Laplace Transform Tables do not provide exhaustive solutions, a technique of a Partial Fractions Expansion is used to find inverse Laplace Transforms for various time functions – see a table of basic Laplace – Time Domain Function pair shown in Table 1‑2.
#### **1\.4.4.1 Residues – Distinct Roots Case**
| |
|---|
| Y(s)\=N(s)∏ni(s−pi)\=N(s)D(s) Y ( s ) \= N ( s ) ∏ i n ( s − p i ) \= N ( s ) D ( s ) Y(s)\=K1s−p1\+K2s−p2\+...\+Kns−pn Y ( s ) \= K 1 s − p 1 \+ K 2 s − p 2 \+ . . . \+ K n s − p n |
#### **1\.4.4.2 Residues – Multiple Roots Case**
```
```
This is the case for Laplace Transforms with multiple powers of some roots. Assume multiplicity of *m* for root r1 r 1:
| |
|---|
| Y(s)\=N(s)∏ni(s−pi)\=N(s)D(s) Y ( s ) \= N ( s ) ∏ i n ( s − p i ) \= N ( s ) D ( s ) Y(s)\=K1s−r1\+K2(s−r1)2\+...\+Km(s−r1)m\+...\+Kns−pn Y ( s ) \= K 1 s − r 1 \+ K 2 ( s − r 1 ) 2 \+ . . . \+ K m ( s − r 1 ) m \+ . . . \+ K n s − p n |
Residues for distinct roots calculated as before:
| |
|---|
| Km\+1\=N(s)(s−p1)D(s)\|s\=pm\+1 K m \+ 1 \= N ( s ) ( s − p 1 ) D ( s ) \| s \= p m \+ 1 ⋮ ⋮ Kn\=N(s)(s−pn)D(s)\|s\=pn K n \= N ( s ) ( s − p n ) D ( s ) \| s \= p n |
To calculate residues for a multiple root, multiply both sides of Equation 1‑12 by (s−r1)m ( s − r 1 ) mand substitute the value of the root r1 r 1:
| |
|---|
| N(s)D(s)\=K1s−r1\+K2(s−r1)2\+...\+Km(s−r1)m\+...\+Kns−pn N ( s ) D ( s ) \= K 1 s − r 1 \+ K 2 ( s − r 1 ) 2 \+ . . . \+ K m ( s − r 1 ) m \+ . . . \+ K n s − p n N(s)(s−r1)mD(s)\=K1(s−r1)ms−r1\+K2(s−r1)m(s−r1)2\+...\+Km\+...\+Kn(s−r1)ms−pn N ( s ) ( s − r 1 ) m D ( s ) \= K 1 ( s − r 1 ) m s − r 1 \+ K 2 ( s − r 1 ) m ( s − r 1 ) 2 \+ . . . \+ K m \+ . . . \+ K n ( s − r 1 ) m s − p n N(s)(s−r1)mD(S)\|s\=r1\=Km N ( s ) ( s − r 1 ) m D ( S ) \| s \= r 1 \= K m |
To calculate the residues for the second multiplicity of the root r1 r 1:
| |
|---|
| dds(N(s)(s−r1)mD(s))\=dds(K1(s−r1)ms−r1\+K2(s−r1)m(s−r1)2\+...\+Km\+...\+Kn(s−r1)ms−pn) d d s ( N ( s ) ( s − r 1 ) m D ( s ) ) \= d d s ( K 1 ( s − r 1 ) m s − r 1 \+ K 2 ( s − r 1 ) m ( s − r 1 ) 2 \+ . . . \+ K m \+ . . . \+ K n ( s − r 1 ) m s − p n ) dds(N(s)(s−r1)mD(s))\|s\=r1\=0\+...\+Km−1\+0\+...\+0 d d s ( N ( s ) ( s − r 1 ) m D ( s ) ) \| s \= r 1 \= 0 \+ . . . \+ K m − 1 \+ 0 \+ . . . \+ 0 |
| | |
|---|---|
| Laplace Transform | Time Domain Function |
| 1 1 | |
To calculate the residues for the remaining multiplicities of the root r1, use this recursive formula:
| |
|---|
| 12\!d2ds2(N(s)(s−r1)mD(s))\|s\=r1\=Km−2 1 2 \! d 2 d s 2 ( N ( s ) ( s − r 1 ) m D ( s ) ) \| s \= r 1 \= K m − 2 1(m−1)\!dm−1dsm−1(N(s)(s−r1)mD(s))\|s\=r1\=Km 1 ( m − 1 ) \! d m − 1 d s m − 1 ( N ( s ) ( s − r 1 ) m D ( s ) ) \| s \= r 1 \= K m |
### **1\.4.5 Examples**
#### **1\.4.5.1 Example**
Consider a system described by the following transfer function and find the pole-zero model of the transfer function and its DC gain.
G(s)\=2s\+3S2\+3s\+2 G ( s ) \= 2 s \+ 3 S 2 \+ 3 s \+ 2
HINT: Use MATLAB software to check your results in this, and the remaining examples in this section.
#### **1\.4.5.2 Example**
Consider a system described by the following transfer function:

5s3\+30s2\+55s\+30s5\+14s4\+62s3\+110s2\+153s\+140 5 s 3 \+ 30 s 2 \+ 55 s \+ 30 s 5 \+ 14 s 4 \+ 62 s 3 \+ 110 s 2 \+ 153 s \+ 140
Find the pole-zero model of the transfer function and its DC gain. **HINT: Use Matlab.**
#### **1\.4.5.3 Example**
A certain LTI system is described as having one zero and four poles, as follows:
z1\=−2\.2 z 1 \= − 2\.2,
p1\=−1\+j1 p 1 \= − 1 \+ j 1,
p2\=−1−j1 p 2 \= − 1 − j 1,
p3\=−10 p 3 \= − 10,
p4\=−2 p 4 \= − 2,
It is also recorded that the system has a DC gain of 5.
Write the complete transfer function of the system in a ZPK form.
#### **1\.4.5.4 Example**
Consider a system described by the following transfer function:
G(s)\=10s2\+30s\+20s4\+14s3\+68s2\+130s\+75 G ( s ) \= 10 s 2 \+ 30 s \+ 20 s 4 \+ 14 s 3 \+ 68 s 2 \+ 130 s \+ 75
Create an LTI object representing this system using both the transfer function model and the zero-pole-gain model. Extract zero-pole-gain data and numerator-denominator from the LTI object. Obtain the system dc gain and the pole-zero map of the transfer function. Obtain a minimum realization of this system. Use MATLAB to solve this problem.
#### **1\.4.5.5 Example**
Consider a system described by the following transfer function:
G(s)\=Y(s)U(s)\=s2\+3s\+3s3\+6s2\+11s\+6 G ( s ) \= Y ( s ) U ( s ) \= s 2 \+ 3 s \+ 3 s 3 \+ 6 s 2 \+ 11 s \+ 6
Find an analytical expression for an impulse response of the system.
#### **1\.4.5.6 Example**
A certain control system is described by the following transfer function:
G(s)\=Y(s)U(s)\=2s\+8s3\+5s2\+8s\+4 G ( s ) \= Y ( s ) U ( s ) \= 2 s \+ 8 s 3 \+ 5 s 2 \+ 8 s \+ 4
Find an analytical expression for a step response of the system.
#### **1\.4.5.7 Example**
A certain control system is described by the following closed loop transfer function:
Gcl(s)\=45(s\+6)(s2\+65s\+354)s G c l ( s ) \= 45 ( s \+ 6 ) ( s 2 \+ 65 s \+ 354 ) s
Find an analytical expression for a step response of the system – note the integrator term in the denominator\!
#### **1\.4.5.8 Example**
A certain control system is described by the following closed loop transfer function:
Gcl(s)\=45(s\+6)s3\+20s2\+129s\+270 G c l ( s ) \= 45 ( s \+ 6 ) s 3 \+ 20 s 2 \+ 129 s \+ 270
One of the closed loop poles is at -5. Find an analytical expression for a step response of the system.
```
```
Previous/next navigation
[Previous: 1.3 Control Objectives](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-3-control-objectives/ "Previous: 1.3 Control Objectives")
[Next: 1.5 Transfer Function Representations of Simple Physical Systems](https://pressbooks.library.torontomu.ca/controlsystems/chapter/1-5-1-5transfer-function-representations-of-simple-physical-systems/ "Next: 1.5 Transfer Function Representations of Simple Physical Systems")
Back to top
## License

[Introduction to Control Systems](https://pressbooks.library.torontomu.ca/controlsystems) Copyright © by Malgorzata Zywno is licensed under a [Creative Commons Attribution-NonCommercial 4.0 International License](https://creativecommons.org/licenses/by-nc/4.0/), except where otherwise noted.
[Powered by Pressbooks](https://pressbooks.com/)
- [Guides and Tutorials](https://pressbooks.com/support/)
- \|[Pressbooks Directory](https://pressbooks.directory/)
[ Pressbooks on YouTube](https://www.youtube.com/user/pressbooks)
[Pressbooks on Twitter](https://twitter.com/intent/follow?screen_name=pressbooks) |
| Readable Markdown | Self-Study: Review your ELE532 Notes and other resources. You can also refer to the review material on the course website.
### **1\.4.1 Definitions**
F ( s ) \= L \[ f ( t ) \] \= ∫ 0 \+ ∞ f ( t ) e − s t d t
f ( t ) \= L − 1 \[ F ( s ) \] \= 1 2 π j ∫ σ − j ∞ σ \+ j ∞ F ( s ) e s t d s
#### **1\.4.1.1 Final Value Theorem**
f s s \= lim t → ∞ f ( t ) \= lim s → 0 s F ( s )
#### **1\.4.1.2 Initial Value Theorem**
f 0 \= lim t → 0 \+ f ( t ) \= lim s → ∞ s F ( s )
#### **1\.4.1.3 Properties of Laplace transforms**
| |
|---|
| F ( s ) e − T s |
### **1\.4.2 Solving for System Response**
Parametric models cannot be developed without math. Laws of physics describe dynamic Linear Time-Invariant (LTI) systems using ordinary differential equations. To simplify their analysis, Laplace transform is used. Consider a certain LTI (Linear Time-Invariant), SISO (Single Input Single Output) system:

Let the input – output relationship for the system be described by the following *n*th order differential equation:
d n y d t n \+ a n − 1 d n − 1 y d t n − 1 \+ . . . \+ a 1 d y d t \+ a 0 y \= b m d m u d t m \+ b m − 1 d m − 1 u d t m − 1 \+ . . . \+ b 1 d u d t \+ b 0 u
The equation parameters relate to physical aspects of the system. The time domain description of systems is not convenient for quick paper-and-pencil speculations. To simplify math, Classical Control uses a Laplace Transform system description, which converts the differential equations into their algebraic equivalents in the s-domain. The solution for y(t) can then be found using inverse Laplace transformation to Y(s).
### **1\.4.3 Two Transfer Functions Models: TF and ZPK**
In the transform domain, the input-output relationship of the system is defined by a transfer function G(s), defined as a ratio of the Laplace transform of the system output signal y(t), to the Laplace transform of the system input signal u(t), with any initial conditions in the system set to zero. The system transfer function G(s) can be thought of as a dynamic gain of the system:

Block diagrams are used to graphically represent systems and their components, as shown above. In order to find G(s), a Laplace transform of the system differential equation in Equation 1‑4 is taken:
| |
|---|
| s n Y ( s ) \+ a n − 1 s n − 1 Y ( s ) \+ . . . \+ a 1 s Y ( s ) \+ a 0 Y ( s ) \= b m s m U ( s ) \+ b m − 1 s m − 1 U ( s ) \+ . . . \+ b 1 s U ( s ) \+ b 0 U ( s ) G ( s ) \= Y ( s ) U ( s ) \= b m s m \+ b m − 1 s m − 1 \+ . . . \+ b 1 s \+ b 0 s n \+ a n − 1 s n − 1 \+ . . . \+ a 1 s \+ a 0 |
Transfer functions are ratios of polynomials written in terms of the s-operator. The resulting function in Equation 1‑5 is a ratio of two polynomials, N(s) and D(s):
| |
|---|
| G ( s ) \= N ( s ) D ( s ) \= b m s m \+ b m − 1 s m − 1 \+ . . . \+ b 1 s \+ b 0 s n \+ a n − 1 s n − 1 \+ . . . \+ a 1 s \+ a 0 |
Roots of the numerator polynomial of G(s) in Equation 1‑6 are called system zeros, z i, and roots of the denominator polynomial are called system poles, p i.
Note that in MATLAB a transfer function object in a polynomial form can be created by using the “tf” command. For example, consider the following transfer function in the polynomial ratio form:
 G ( s ) \= Y ( s ) U ( s ) \= 2 s \+ 20 s 2 \+ 4 s \+ 3
The same transfer function G ( s ) can be represented in the so-called ZPK form (factorized form):
| |
|---|
| G ( s ) \= K ∏ i m ( s − z i ) ∏ j n ( s − p j ) |
*K* is a multiplier. It is important to see the difference between *K* and *K*dc, which denotes the DC gain of the system (i.e. s=0):
| |
|---|
| K d c \= G ( 0 ) \= N ( 0 ) D ( 0 ) \= b 0 a 0 \= K ∏ i m ( − z i ) ∏ j n ( − p j ) |
Our transfer function can be factorized and the multiplier gain K is equal to 2:
G ( s ) \= Y ( s ) U ( s ) \= 2 ( s \+ 10 ) ( s \+ 1 ) ( s \+ 3 )
The DC gain of our transfer function is:
K D C \= G ( 0 ) \= 2 ( 10 ) ( 1 ) ( 3 ) \= 6\.667
In MATLAB the transfer function can be shown in a factorized form by using the “zpk” command, and the DC gain can be found using “dcgain” command:

In MATLAB the “zpk” command can be used to create a transfer function object in a ZPK form, and “tf” command to convert it to a polynomial form.

Locations of the system poles and zeros can be presented graphically as the so-called Pole-Zero Map.
### **1\.4.4 Partial Fractions Technique**
If a certain control system is described by a transfer function G(s), the system response can be found as Y ( s ) \= U ( s ) ⋅ G ( s ). Since Laplace Transform Tables do not provide exhaustive solutions, a technique of a Partial Fractions Expansion is used to find inverse Laplace Transforms for various time functions – see a table of basic Laplace – Time Domain Function pair shown in Table 1‑2.
#### **1\.4.4.1 Residues – Distinct Roots Case**
| |
|---|
| Y ( s ) \= N ( s ) ∏ i n ( s − p i ) \= N ( s ) D ( s ) Y ( s ) \= K 1 s − p 1 \+ K 2 s − p 2 \+ . . . \+ K n s − p n |
#### **1\.4.4.2 Residues – Multiple Roots Case**
```
```
This is the case for Laplace Transforms with multiple powers of some roots. Assume multiplicity of *m* for root r 1:
Y ( s ) \= N ( s ) ∏ i n ( s − p i ) \= N ( s ) D ( s )
Y ( s ) \= K 1 s − r 1 \+ K 2 ( s − r 1 ) 2 \+ . . . \+ K m ( s − r 1 ) m \+ . . . \+ K n s − p n
Residues for distinct roots calculated as before:
K m \+ 1 \= N ( s ) ( s − p 1 ) D ( s ) \| s \= p m \+ 1
⋮
K n \= N ( s ) ( s − p n ) D ( s ) \| s \= p n
To calculate residues for a multiple root, multiply both sides of Equation 1‑12 by ( s − r 1 ) mand substitute the value of the root r 1:
N ( s ) D ( s ) \= K 1 s − r 1 \+ K 2 ( s − r 1 ) 2 \+ . . . \+ K m ( s − r 1 ) m \+ . . . \+ K n s − p n
N ( s ) ( s − r 1 ) m D ( s ) \= K 1 ( s − r 1 ) m s − r 1 \+ K 2 ( s − r 1 ) m ( s − r 1 ) 2 \+ . . . \+ K m \+ . . . \+ K n ( s − r 1 ) m s − p n
N ( s ) ( s − r 1 ) m D ( S ) \| s \= r 1 \= K m
To calculate the residues for the second multiplicity of the root r 1:
d d s ( N ( s ) ( s − r 1 ) m D ( s ) ) \= d d s ( K 1 ( s − r 1 ) m s − r 1 \+ K 2 ( s − r 1 ) m ( s − r 1 ) 2 \+ . . . \+ K m \+ . . . \+ K n ( s − r 1 ) m s − p n )
d d s ( N ( s ) ( s − r 1 ) m D ( s ) ) \| s \= r 1 \= 0 \+ . . . \+ K m − 1 \+ 0 \+ . . . \+ 0
| | |
|---|---|
| Laplace Transform | Time Domain Function |
| 1 | |
To calculate the residues for the remaining multiplicities of the root r1, use this recursive formula:
1 2 \! d 2 d s 2 ( N ( s ) ( s − r 1 ) m D ( s ) ) \| s \= r 1 \= K m − 2
1 ( m − 1 ) \! d m − 1 d s m − 1 ( N ( s ) ( s − r 1 ) m D ( s ) ) \| s \= r 1 \= K m
### **1\.4.5 Examples**
#### **1\.4.5.1 Example**
Consider a system described by the following transfer function and find the pole-zero model of the transfer function and its DC gain.
G ( s ) \= 2 s \+ 3 S 2 \+ 3 s \+ 2
HINT: Use MATLAB software to check your results in this, and the remaining examples in this section.
#### **1\.4.5.2 Example**
Consider a system described by the following transfer function:

5 s 3 \+ 30 s 2 \+ 55 s \+ 30 s 5 \+ 14 s 4 \+ 62 s 3 \+ 110 s 2 \+ 153 s \+ 140
Find the pole-zero model of the transfer function and its DC gain. **HINT: Use Matlab.**
#### **1\.4.5.3 Example**
A certain LTI system is described as having one zero and four poles, as follows:
z 1 \= − 2\.2,
p 1 \= − 1 \+ j 1,
p 2 \= − 1 − j 1,
p 3 \= − 10,
p 4 \= − 2,
It is also recorded that the system has a DC gain of 5.
Write the complete transfer function of the system in a ZPK form.
#### **1\.4.5.4 Example**
Consider a system described by the following transfer function:
G ( s ) \= 10 s 2 \+ 30 s \+ 20 s 4 \+ 14 s 3 \+ 68 s 2 \+ 130 s \+ 75
Create an LTI object representing this system using both the transfer function model and the zero-pole-gain model. Extract zero-pole-gain data and numerator-denominator from the LTI object. Obtain the system dc gain and the pole-zero map of the transfer function. Obtain a minimum realization of this system. Use MATLAB to solve this problem.
#### **1\.4.5.5 Example**
Consider a system described by the following transfer function:
G ( s ) \= Y ( s ) U ( s ) \= s 2 \+ 3 s \+ 3 s 3 \+ 6 s 2 \+ 11 s \+ 6
Find an analytical expression for an impulse response of the system.
#### **1\.4.5.6 Example**
A certain control system is described by the following transfer function:
G ( s ) \= Y ( s ) U ( s ) \= 2 s \+ 8 s 3 \+ 5 s 2 \+ 8 s \+ 4
Find an analytical expression for a step response of the system.
#### **1\.4.5.7 Example**
A certain control system is described by the following closed loop transfer function:
G c l ( s ) \= 45 ( s \+ 6 ) ( s 2 \+ 65 s \+ 354 ) s
Find an analytical expression for a step response of the system – note the integrator term in the denominator\!
#### **1\.4.5.8 Example**
A certain control system is described by the following closed loop transfer function:
G c l ( s ) \= 45 ( s \+ 6 ) s 3 \+ 20 s 2 \+ 129 s \+ 270
One of the closed loop poles is at -5. Find an analytical expression for a step response of the system.
```
``` |
| Shard | 0 (laksa) |
| Root Hash | 7622135113927760600 |
| Unparsed URL | ca,torontomu!library,pressbooks,/controlsystems/chapter/1-4-laplace-transforms/ s443 |