ℹ️ Skipped - page is already crawled
| Filter | Status | Condition | Details |
|---|---|---|---|
| HTTP status | PASS | download_http_code = 200 | HTTP 200 |
| Age cutoff | PASS | download_stamp > now() - 6 MONTH | 0.1 months ago (distributed domain, exempt) |
| History drop | PASS | isNull(history_drop_reason) | No drop reason |
| Spam/ban | PASS | fh_dont_index != 1 AND ml_spam_score = 0 | ml_spam_score=0 |
| Canonical | PASS | meta_canonical IS NULL OR = '' OR = src_unparsed | Not set |
| Property | Value | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| URL | https://en.wikipedia.org/wiki/Inverse_trigonometric_functions | |||||||||
| Last Crawled | 2026-04-19 19:40:07 (2 days ago) | |||||||||
| First Indexed | 2013-08-11 01:41:26 (12 years ago) | |||||||||
| HTTP Status Code | 200 | |||||||||
| Content | ||||||||||
| Meta Title | Inverse trigonometric functions - Wikipedia | |||||||||
| Meta Description | null | |||||||||
| Meta Canonical | null | |||||||||
| Boilerpipe Text | In
mathematics
, the
inverse trigonometric functions
(occasionally also called
antitrigonometric
,
[
1
]
cyclometric
,
[
2
]
or
arcus
functions
[
3
]
) are the
inverse functions
of the
trigonometric functions
, under suitably restricted
domains
. Specifically, they are the inverses of the
sine
,
cosine
,
tangent
,
cotangent
,
secant
, and
cosecant
functions,
[
4
]
and are used to obtain an angle from any of the angle's trigonometric ratios. Inverse trigonometric functions are widely used in
engineering
,
navigation
,
physics
, and
geometry
.
For a circle of radius 1, arcsin and arccos are the lengths of actual arcs determined by the quantities in question.
Several notations for the inverse trigonometric functions exist. The most common convention is to name inverse trigonometric functions using an arc- prefix:
arcsin(
x
)
,
arccos(
x
)
,
arctan(
x
)
, etc.
[
1
]
(This convention is used throughout this article.) This notation arises from the following geometric relationships:
[
citation needed
]
when measuring in radians, an angle of
θ
radians will correspond to an
arc
whose length is
rθ
, where
r
is the radius of the circle. Thus in the
unit circle
, the cosine of x function is both the arc and the angle, because the arc of a circle of radius 1 is the same as the angle. Or, "the arc whose cosine is
x
" is the same as "the angle whose cosine is
x
", because the length of the arc of the circle in radii is the same as the measurement of the angle in radians.
[
5
]
In computer programming languages, the inverse trigonometric functions are often called by the abbreviated forms
asin
,
acos
,
atan
.
[
6
]
The notations
sin
−1
(
x
)
,
cos
−1
(
x
)
,
tan
−1
(
x
)
, etc., as introduced by
John Herschel
in 1813,
[
7
]
[
8
]
are often used as well in English-language sources,
[
1
]
much more than the also
established
sin
[−1]
(
x
)
,
cos
[−1]
(
x
)
,
tan
[−1]
(
x
)
– conventions consistent with the notation of an
inverse function
, that is useful (for example) to define the
multivalued
version of each inverse trigonometric function:
However, this might appear to conflict logically with the common semantics for expressions such as
sin
2
(
x
)
(although only
sin
2
x
, without parentheses, is the really common use), which refer to numeric power rather than
function composition
, and therefore may result in confusion between notation for the
reciprocal
(
multiplicative inverse
) and
inverse function
.
[
9
]
The confusion is somewhat mitigated by the fact that each of the reciprocal trigonometric functions has its own name — for example,
(cos(
x
))
−1
= sec(
x
)
. Nevertheless, certain authors advise against using it, since it is ambiguous.
[
1
]
[
10
]
Another precarious convention used by a small number of authors is to use an
uppercase
first letter, along with a “
−1
” superscript:
Sin
−1
(
x
)
,
Cos
−1
(
x
)
,
Tan
−1
(
x
)
, etc.
[
11
]
Although it is intended to avoid confusion with the
reciprocal
, which should be represented by
sin
−1
(
x
)
,
cos
−1
(
x
)
, etc., or, better, by
sin
−1
x
,
cos
−1
x
, etc., it in turn creates yet another major source of ambiguity, especially since many popular high-level programming languages (e.g.
Mathematica
and
MAGMA
) use those very same capitalised representations for the standard trig functions, whereas others (
Python
,
SymPy
,
NumPy
,
Matlab
,
MAPLE
, etc.) use lower-case.
Hence, since 2009, the
ISO 80000-2
standard has specified solely the "arc" prefix for the inverse functions.
The points labelled
1
,
Sec(
θ
)
,
Csc(
θ
)
represent the length of the line segment from the origin to that point.
Sin(
θ
)
,
Tan(
θ
)
, and
1
are the heights to the line starting from the
x
-axis, while
Cos(
θ
)
,
1
, and
Cot(
θ
)
are lengths along the
x
-axis starting from the origin.
Since none of the six trigonometric functions are
one-to-one
, they must be restricted in order to have inverse functions. Therefore, the result
ranges
of the inverse functions are proper (i.e. strict)
subsets
of the domains of the original functions.
For example, using
function
in the sense of
multivalued functions
, just as the
square root
function
could be defined from
the function
is defined so that
For a given
real number
with
there are multiple (in fact,
countably infinitely
many) numbers
such that
; for example,
but also
etc. When only one value is desired, the function may be restricted to its
principal branch
. With this restriction, for each
in the domain, the expression
will evaluate only to a single value, called its
principal value
. These properties apply to all the inverse trigonometric functions.
The principal inverses are listed in the following table.
Name
Usual notation
Definition
Domain of
x
for real result
Range of usual principal value
(
radians
)
Range of usual principal value
(
degrees
)
arcsine
y
= arcsin(
x
)
x
=
sin
(
y
)
−1 ≤
x
≤ 1
−
π
/
2
≤
y
≤
π
/
2
−90° ≤
y
≤ 90°
arccosine
y
= arccos(
x
)
x
=
cos
(
y
)
−1 ≤
x
≤ 1
0 ≤
y
≤ π
0° ≤
y
≤ 180°
arctangent
y
= arctan(
x
)
x
=
tan
(
y
)
all real numbers
−
π
/
2
<
y
<
π
/
2
−90° <
y
< 90°
arccotangent
y
= arccot(
x
)
x
=
cot
(
y
)
all real numbers
0 <
y
< π
0° <
y
< 180°
arcsecant
y
= arcsec(
x
)
x
=
sec
(
y
)
|
x
| ≥ 1
0 ≤
y
<
π
/
2
or
π
/
2
<
y
≤ π
0° ≤
y
< 90°
or
90° <
y
≤ 180°
arccosecant
y
= arccsc(
x
)
x
=
csc
(
y
)
|
x
| ≥ 1
−
π
/
2
≤
y
< 0
or
0 <
y
≤
π
/
2
−90° ≤
y
< 0
or
0° <
y
≤ 90°
Note: Some authors define the range of arcsecant to be
(
or
),
[
12
]
because the tangent function is nonnegative on this domain. This makes some computations more consistent. For example, using this range,
whereas with the range
(
or
),
we would have to write
since tangent is nonnegative on
but nonpositive on
For a similar reason, the same authors define the range of arccosecant to be
or
If
x
is allowed to be a
complex number
, then the range of
y
applies only to its real part.
The table below displays names and domains of the inverse trigonometric functions along with the
range
of their usual
principal values
in
radians
.
Name
Symbol
Domain
Image/Range
Inverse
function
Domain
Image
of
principal values
sine
cosine
tangent
cotangent
secant
cosecant
The symbol
denotes the set of all
real numbers
and
denotes the set of all
integers
. The set of all integer multiples of
is denoted by
The symbol
denotes
set subtraction
so that, for instance,
is the set of points in
(that is, real numbers) that are
not
in the interval
The
Minkowski sum
notation
and
that is used above to concisely write the domains of
is now explained.
Domain of cotangent
and cosecant
:
The domains of
and
are the same. They are the set of all angles
at which
i.e. all real numbers that are
not
of the form
for some integer
Domain of tangent
and secant
:
The domains of
and
are the same. They are the set of all angles
at which
Solutions to elementary trigonometric equations
[
edit
]
Each of the trigonometric functions is periodic in the real part of its argument, running through all its values twice in each interval of
This periodicity is reflected in the general inverses, where
is some integer.
The following table shows how inverse trigonometric functions may be used to solve equalities involving the six standard trigonometric functions.
It is assumed that the given values
and
all lie within appropriate ranges so that the relevant expressions below are
well-defined
.
Note that "for some
" is just another way of saying "for some
integer
"
The symbol
is
logical equality
and indicates that if the left hand side is true then so is the right hand side and, conversely, if the right hand side is true then so is the left hand side (see this footnote
[
note 1
]
for more details and an example illustrating this concept).
Equation
if and only if
Solution
for some
for some
for some
for some
for some
for some
where the first four solutions can be written in expanded form as:
Equation
if and only if
Solution
or
for some
or
for some
or
for some
or
for some
For example, if
then
for some
While if
then
for some
where
will be even if
and it will be odd if
The equations
and
have the same solutions as
and
respectively. In all equations above
except
for those just solved (i.e. except for
/
and
/
), the integer
in the solution's formula is uniquely determined by
(for fixed
and
).
With the help of
integer parity
it is possible to write a solution to
that doesn't involve the "plus or minus"
symbol:
if and only if
for some
And similarly for the secant function,
if and only if
for some
where
equals
when the integer
is even, and equals
when it's odd.
Detailed example and explanation of the "plus or minus" symbol
±
[
edit
]
The solutions to
and
involve the "plus or minus" symbol
whose meaning is now clarified. Only the solution to
will be discussed since the discussion for
is the same.
We are given
between
and we know that there is an angle
in some interval that satisfies
We want to find this
The table above indicates that the solution is
which is a shorthand way of saying that (at least) one of the following statement is true:
for some integer
or
for some integer
As mentioned above, if
(which by definition only happens when
) then both statements (1) and (2) hold, although with different values for the integer
: if
is the integer from statement (1), meaning that
holds, then the integer
for statement (2) is
(because
).
However, if
then the integer
is unique and completely determined by
If
(which by definition only happens when
) then
(because
and
so in both cases
is equal to
) and so the statements (1) and (2) happen to be identical in this particular case (and so both hold).
Having considered the cases
and
we now focus on the case where
and
So assume this from now on. The solution to
is still
which as before is shorthand for saying that one of statements (1) and (2) is true. However this time, because
and
statements (1) and (2) are different and furthermore,
exactly one
of the two equalities holds (not both). Additional information about
is needed to determine which one holds. For example, suppose that
and that
all
that is known about
is that
(and nothing more is known). Then
and moreover, in this particular case
(for both the
case and the
case) and so consequently,
This means that
could be either
or
Without additional information it is not possible to determine which of these values
has.
An example of some additional information that could determine the value of
would be knowing that the angle is above the
-axis (in which case
) or alternatively, knowing that it is below the
-axis (in which case
).
Equal identical trigonometric functions
[
edit
]
The table below shows how two angles
and
must be related if their values under a given trigonometric function are equal or negatives of each other.
Equation
if and only if
Solution (for some
)
Also a solution to
The vertical double arrow
in the last row indicates that
and
satisfy
if and only if they satisfy
Set of all solutions to elementary trigonometric equations
Thus given a single solution
to an elementary trigonometric equation (
is such an equation, for instance, and because
always holds,
is always a solution), the set of all solutions to it are:
If
solves
then
Set of all solutions (in terms of
)
then
then
then
then
then
then
Transforming equations
[
edit
]
The equations above can be transformed by using the reflection and shift identities:
[
13
]
Transforming equations by shifts and reflections
Argument:
These formulas imply, in particular, that the following hold:
where swapping
swapping
and swapping
gives the analogous equations for
respectively.
So for example, by using the equality
the equation
can be transformed into
which allows for the solution to the equation
(where
) to be used; that solution being:
which becomes:
where using the fact that
and substituting
proves that another solution to
is:
The substitution
may be used express the right hand side of the above formula in terms of
instead of
Relationships between trigonometric functions and inverse trigonometric functions
[
edit
]
Trigonometric functions of inverse trigonometric functions are tabulated below. They may be derived from the Pythagorean identities. Another way is by considering the geometry of a right-angled triangle, with one side of length 1 and another side of length
then applying the
Pythagorean theorem
and definitions of the trigonometric ratios. It is worth noting that for arcsecant and arccosecant, the diagram assumes that
is positive, and thus the result has to be corrected through the use of
absolute values
and the
signum
(sgn) operation.
Diagram
Relationships among the inverse trigonometric functions
[
edit
]
The usual principal values of the arcsin(
x
) (red) and arccos(
x
) (blue) functions graphed on the cartesian plane.
The usual principal values of the arctan(
x
) and arccot(
x
) functions graphed on the cartesian plane.
Principal values of the arcsec(
x
) and arccsc(
x
) functions graphed on the cartesian plane.
Complementary angles:
Negative arguments:
Reciprocal arguments:
The identities above can be used with (and derived from) the fact that
and
are
reciprocals
(i.e.
), as are
and
and
and
Useful identities if one only has a fragment of a sine table:
Whenever the square root of a complex number is used here, we choose the root with the positive real part (or positive imaginary part if the square was negative real).
A useful form that follows directly from the table above is
.
It is obtained by recognizing that
.
From the
half-angle formula
,
, we get:
Arctangent addition formula
[
edit
]
This is derived from the tangent
addition formula
by letting
Derivatives of inverse trigonometric functions
[
edit
]
The
derivatives
for complex values of
z
are as follows:
Only for real values of
x
:
These formulas can be derived in terms of the derivatives of trigonometric functions. For example, if
, then
so
Expression as definite integrals
[
edit
]
Integrating the derivative and fixing the value at one point gives an expression for the inverse trigonometric function as a
definite integral
:
When
x
equals 1, the integrals with limited domains are
improper integrals
, but still well-defined.
Similar to the sine and cosine functions, the inverse trigonometric functions can also be calculated using
power series
, as follows. For arcsine, the series can be derived by expanding its derivative,
, as a
binomial series
, and integrating term by term (using the integral definition as above). The series for arctangent can similarly be derived by expanding its derivative
in a
geometric series
, and applying the integral definition above (see
Leibniz series
).
The
Taylor series
for arctangent is also known as the
arctangent series
or Gregory's series.
Series for the other inverse trigonometric functions can be given in terms of these according to the relationships given above. For example,
,
, and so on. Another series is given by:
[
14
]
Leonhard Euler
found a series for the arctangent that converges more quickly than its
Taylor series
:
[
15
]
(The term in the sum for
n
= 0 is the
empty product
, so is 1.)
Alternatively, this can be expressed as
Another series for the arctangent function is given by
where
is the
imaginary unit
.
[
16
]
Continued fractions for arctangent
[
edit
]
Two alternatives to the power series for arctangent are these
generalized continued fractions
:
The second of these is valid in the cut complex plane. There are two cuts, from −
i
to the
point at infinity
, going down the imaginary axis, and from
i
to the point at infinity, going up the same axis. It works best for real numbers running from −1 to 1. The partial denominators are the odd natural numbers, and the partial numerators (after the first) are just (
nz
)
2
, with each perfect square appearing once. The first was developed by
Leonhard Euler
, the second by
Carl Friedrich Gauss
utilizing the
Gaussian hypergeometric series
.
Indefinite integrals of inverse trigonometric functions
[
edit
]
For real and complex values of
z
:
For real
x
≥ 1:
For all real
x
not between -1 and 1:
The absolute value is necessary to compensate for both negative and positive values of the arcsecant and arccosecant functions. The signum function is also necessary due to the absolute values in the
derivatives
of the two functions, which create two different solutions for positive and negative values of x. These can be further simplified using the logarithmic definitions of the
inverse hyperbolic functions
:
The absolute value in the argument of the arcosh function creates a negative half of its graph, making it identical to the signum logarithmic function shown above.
All of these antiderivatives can be derived using
integration by parts
and the simple derivative forms shown above.
Using
(i.e.
integration by parts
), set
Then
which by the simple
substitution
yields the final result:
Extension to the complex plane
[
edit
]
A
Riemann surface
for the argument of the relation
tan
z
=
x
. The orange sheet in the middle is the principal sheet representing
arctan
x
. The blue sheet above and green sheet below are displaced by
2
π
and
−2
π
respectively.
Since the inverse trigonometric functions are
analytic functions
, they can be extended from the
real line
to the complex plane. This results in functions with multiple sheets and
branch points
. One possible way of defining the extension is:
where the part of the imaginary axis which does not lie strictly between the branch points (−i and +i) is the
branch cut
between the principal sheet and other sheets. The path of the integral must not cross a branch cut. For
z
not on a branch cut, a straight line path from 0 to
z
is such a path. For
z
on a branch cut, the path must approach from
Re[x] > 0
for the upper branch cut and from
Re[x] < 0
for the lower branch cut.
The arcsine function may then be defined as:
where (the square-root function has its cut along the negative real axis and) the part of the real axis which does not lie strictly between −1 and +1 is the branch cut between the principal sheet of arcsin and other sheets;
which has the same cut as arcsin;
which has the same cut as arctan;
where the part of the real axis between −1 and +1 inclusive is the cut between the principal sheet of arcsec and other sheets;
which has the same cut as arcsec.
These functions may also be expressed using
complex logarithms
. This extends their
domains
to the
complex plane
in a natural fashion. The following identities for principal values of the functions hold everywhere that they are defined, even on their branch cuts.
Because all of the inverse trigonometric functions output an angle of a right triangle, they can be generalized by using
Euler's formula
to form a right triangle in the complex plane. Algebraically, this gives us:
or
where
is the adjacent side,
is the opposite side, and
is the
hypotenuse
. From here, we can solve for
.
or
Simply taking the imaginary part works for any real-valued
and
, but if
or
is complex-valued, we have to use the final equation so that the real part of the result isn't excluded. Since the length of the hypotenuse doesn't change the angle, ignoring the real part of
also removes
from the equation. In the final equation, we see that the angle of the triangle in the complex plane can be found by inputting the lengths of each side. By setting one of the three sides equal to 1 and one of the remaining sides equal to our input
, we obtain a formula for one of the inverse trig functions, for a total of six equations. Because the inverse trig functions require only one input, we must put the final side of the triangle in terms of the other two using the
Pythagorean theorem
relation
The table below shows the values of a, b, and c for each of the inverse trig functions and the equivalent expressions for
that result from plugging the values into the equations
above and simplifying.
The particular form of the simplified expression can cause the output to differ from the
usual principal branch
of each of the inverse trig functions. The formulations given will output the usual principal branch when using the
and
principal branch for every function except arccotangent in the
column. Arccotangent in the
column will output on its usual principal branch by using the
and
convention.
In this sense, all of the inverse trig functions can be thought of as specific cases of the complex-valued log function. Since these definition work for any complex-valued
, the definitions allow for
hyperbolic angles
as outputs and can be used to further define the
inverse hyperbolic functions
. It's possible to algebraically prove these relations by starting with the exponential forms of the trigonometric functions and solving for the inverse function.
Using the
exponential definition of sine
, and letting
(the positive branch is chosen)
Color wheel graphs
of
inverse trigonometric functions in the
complex plane
Finding the angle of a right triangle
[
edit
]
A
right triangle
with sides relative to an angle at the
point.
Inverse trigonometric functions are useful when trying to determine the remaining two angles of a
right triangle
when the lengths of the sides of the triangle are known. Recalling the right-triangle definitions of sine and cosine, it follows that
Often, the hypotenuse is unknown and would need to be calculated before using arcsine or arccosine using the
Pythagorean theorem
:
where
is the length of the hypotenuse. Arctangent comes in handy in this situation, as the length of the hypotenuse is not needed.
For example, suppose a roof drops 8 feet as it runs out 20 feet. The roof makes an angle
θ
with the horizontal, where
θ
may be computed as follows:
In computer science and engineering
[
edit
]
Two-argument variant of arctangent
[
edit
]
The two-argument
atan2
function computes the arctangent of
y
/
x
given
y
and
x
, but with a range of
(−π, π]
. In other words,
atan2(
y
,
x
)
is the angle between the positive
x
-axis of a plane and the point
(
x
,
y
)
on it, with positive sign for counter-clockwise angles (
upper half-plane
,
y
> 0
), and negative sign for clockwise angles (lower half-plane,
y
< 0
). It was first introduced in many computer programming languages, but it is now also common in other fields of science and engineering.
In terms of the standard
arctan
function, that is with range of
(−π/2, π/2)
, it can be expressed as follows:
It also equals the
principal value
of the
argument
of the
complex number
x
+
iy
.
This limited version of the function above may also be defined using the
tangent half-angle formulae
as follows:
provided that either
x
> 0
or
y
≠ 0
. However this fails if given
x
≤ 0
and
y
= 0
so the expression is unsuitable for computational use.
The above argument order (
y
,
x
) seems to be the most common, and in particular is used in
ISO standards
such as the
C programming language
, but a few authors may use the opposite convention (
x
,
y
) so some caution is warranted.
(See variations at
atan2 § Realizations of the function in common computer languages
.)
Arctangent function with location parameter
[
edit
]
In many applications
[
17
]
the solution
of the equation
is to come as close as possible to a given value
. The adequate solution is produced by the parameter modified arctangent function
The function
rounds to the nearest integer.
For angles near 0 and
π
, arccosine is
ill-conditioned
, and similarly with arcsine for angles near −
π
/2 and
π
/2. Computer applications thus need to consider the stability of inputs to these functions and the sensitivity of their calculations, or use alternate methods.
[
18
]
Arcsine distribution
Inverse exsecant
Inverse versine
Inverse hyperbolic functions
List of integrals of inverse trigonometric functions
List of trigonometric identities
Trigonometric function
Trigonometric functions of matrices
^
The expression "LHS
RHS" indicates that
either
(a) the left hand side (i.e. LHS) and right hand side (i.e. RHS) are
both
true, or else (b) the left hand side and right hand side are
both
false; there is
no
option (c) (e.g. it is
not
possible for the LHS statement to be true and also simultaneously for the RHS statement to be false), because otherwise "LHS
RHS" would not have been written.
To clarify, suppose that it is written "LHS
RHS" where LHS (which abbreviates
left hand side
) and RHS are both statements that can individually be either be true or false. For example, if
and
are some given and fixed numbers and if the following is written:
then LHS is the statement "
". Depending on what specific values
and
have, this LHS statement can either be true or false. For instance, LHS is true if
and
(because in this case
) but LHS is false if
and
(because in this case
which is not equal to
); more generally, LHS is false if
and
Similarly, RHS is the statement "
for some
". The RHS statement can also either true or false (as before, whether the RHS statement is true or false depends on what specific values
and
have). The logical equality symbol
means that (a) if the LHS statement is true then the RHS statement is also
necessarily
true, and moreover (b) if the LHS statement is false then the RHS statement is also
necessarily
false. Similarly,
also
means that (c) if the RHS statement is true then the LHS statement is also
necessarily
true, and moreover (d) if the RHS statement is false then the LHS statement is also
necessarily
false.
Abramowitz, Milton
;
Stegun, Irene A.
, eds. (1972).
Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables
. New York:
Dover Publications
.
ISBN
978-0-486-61272-0
.
^
a
b
c
d
Hall, Arthur Graham; Frink, Fred Goodrich (Jan 1909).
"Chapter II. The Acute Angle [14] Inverse trigonometric functions"
. Written at Ann Arbor, Michigan, USA.
Trigonometry
. Vol. Part I: Plane Trigonometry. New York, USA:
Henry Holt and Company
/ Norwood Press / J. S. Cushing Co. - Berwick & Smith Co., Norwood, Massachusetts, USA. p. 15
. Retrieved
2017-08-12
.
[…]
α = arcsin
m
: It is frequently read "
arc-sine
m
" or "
anti-sine
m
," since two mutually inverse functions are said each to be the
anti-function
of the other. […] A similar symbolic relation holds for the other
trigonometric functions
. […] This notation is universally used in Europe and is fast gaining ground in this country. A less desirable symbol,
α = sin
-1
m
, is still found in English and American texts. The notation
α = inv sin
m
is perhaps better still on account of its general applicability. […]
^
Klein, Felix
(1924) [1902].
Elementarmathematik vom höheren Standpunkt aus: Arithmetik, Algebra, Analysis
(in German). Vol. 1 (3rd ed.). Berlin: J. Springer.
Translated as
Elementary Mathematics from an Advanced Standpoint: Arithmetic, Algebra, Analysis
. Translated by Hedrick, E. R.; Noble, C. A. Macmillan. 1932.
ISBN
978-0-486-43480-3
.
^
Hazewinkel, Michiel
(1994) [1987].
Encyclopaedia of Mathematics
(unabridged reprint ed.).
Kluwer Academic Publishers
/
Springer Science & Business Media
.
ISBN
978-155608010-4
.
Bronshtein, I. N.; Semendyayev, K. A.; Musiol, Gerhard; Mühlig, Heiner. "Cyclometric or Inverse Trigonometric Functions".
Handbook of Mathematics
(6th ed.). Berlin: Springer.
§ 2.8
, pp. 85–89.
doi
:
10.1007/978-3-663-46221-8
(inactive 1 Jul 2025).
{{
cite book
}}
: CS1 maint: DOI inactive as of July 2025 (
link
)
However, the term "arcus function" can also refer to the function giving the
argument
of a complex number, sometimes called the
arcus
.
^
Weisstein, Eric W.
"Inverse Trigonometric Functions"
.
mathworld.wolfram.com
. Retrieved
2020-08-29
.
^
Beach, Frederick Converse; Rines, George Edwin, eds. (1912). "Inverse trigonometric functions".
The Americana: a universal reference library
. Vol. 21.
^
Cook, John D. (11 Feb 2021).
"Trig functions across programming languages"
.
johndcook.com
(blog)
. Retrieved
2021-03-10
.
^
Cajori, Florian
(1919).
A History of Mathematics
(2 ed.). New York, NY:
The Macmillan Company
. p.
272
.
^
Herschel, John Frederick William
(1813).
"On a remarkable Application of Cotes's Theorem"
.
Philosophical Transactions
.
103
(1). Royal Society, London: 8.
doi
:
10.1098/rstl.1813.0005
.
^
"Inverse trigonometric functions"
. Wiki.
Brilliant Math & Science (brilliant.org)
. Retrieved
2020-08-29
.
^
Korn, Grandino Arthur;
Korn, Theresa M.
(2000) [1961]. "21.2.-4. Inverse Trigonometric Functions".
Mathematical handbook for scientists and engineers: Definitions, theorems, and formulars for reference and review
(3 ed.). Mineola, New York, USA:
Dover Publications, Inc.
p.
811
.
ISBN
978-0-486-41147-7
.
^
Bhatti, Sanaullah; Nawab-ud-Din; Ahmed, Bashir; Yousuf, S. M.; Taheem, Allah Bukhsh (1999). "Differentiation of Trigonometric, Logarithmic and Exponential Functions". In Ellahi, Mohammad Maqbool; Dar, Karamat Hussain; Hussain, Faheem (eds.).
Calculus and Analytic Geometry
(1 ed.).
Lahore
: Punjab Textbook Board. p. 140.
^
For example:
Stewart, James; Clegg, Daniel; Watson, Saleem (2021). "Inverse Functions and Logarithms".
Calculus: Early Transcendentals
(9th ed.). Cengage Learning. § 1.5, p. 64.
ISBN
978-1-337-61392-7
.
^
Abramowitz & Stegun 1972
, p. 73, 4.3.44
^
Borwein, Jonathan; Bailey, David; Gingersohn, Roland (2004).
Experimentation in Mathematics: Computational Paths to Discovery
(1 ed.). Wellesley, MA, USA:
A. K. Peters
. p.
51
.
ISBN
978-1-56881-136-9
.
^
Hwang Chien-Lih (2005), "An elementary derivation of Euler's series for the arctangent function",
The Mathematical Gazette
,
89
(516):
469–
470,
doi
:
10.1017/S0025557200178404
,
S2CID
123395287
^
S. M. Abrarov and B. M. Quine (2018), "A formula for pi involving nested radicals",
The Ramanujan Journal
,
46
(3):
657–
665,
arXiv
:
1610.07713
,
doi
:
10.1007/s11139-018-9996-8
,
S2CID
119150623
^
when a time varying angle crossing
should be mapped by a smooth line instead of a saw toothed one (robotics, astronomy, angular movement in general)
[
citation needed
]
^
Gade, Kenneth (2010).
"A non-singular horizontal position representation"
(PDF)
.
The Journal of Navigation
.
63
(3).
Cambridge University Press
:
395–
417.
Bibcode
:
2010JNav...63..395G
.
doi
:
10.1017/S0373463309990415
.
Weisstein, Eric W.
"Inverse Tangent"
.
MathWorld
. | |||||||||
| Markdown | [Jump to content](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#bodyContent)
Main menu
Main menu
move to sidebar
hide
Navigation
- [Main page](https://en.wikipedia.org/wiki/Main_Page "Visit the main page [z]")
- [Contents](https://en.wikipedia.org/wiki/Wikipedia:Contents "Guides to browsing Wikipedia")
- [Current events](https://en.wikipedia.org/wiki/Portal:Current_events "Articles related to current events")
- [Random article](https://en.wikipedia.org/wiki/Special:Random "Visit a randomly selected article [x]")
- [About Wikipedia](https://en.wikipedia.org/wiki/Wikipedia:About "Learn about Wikipedia and how it works")
- [Contact us](https://en.wikipedia.org/wiki/Wikipedia:Contact_us "How to contact Wikipedia")
Contribute
- [Help](https://en.wikipedia.org/wiki/Help:Contents "Guidance on how to use and edit Wikipedia")
- [Learn to edit](https://en.wikipedia.org/wiki/Help:Introduction "Learn how to edit Wikipedia")
- [Community portal](https://en.wikipedia.org/wiki/Wikipedia:Community_portal "The hub for editors")
- [Recent changes](https://en.wikipedia.org/wiki/Special:RecentChanges "A list of recent changes to Wikipedia [r]")
- [Upload file](https://en.wikipedia.org/wiki/Wikipedia:File_upload_wizard "Add images or other media for use on Wikipedia")
- [Special pages](https://en.wikipedia.org/wiki/Special:SpecialPages "A list of all special pages [q]")
[  ](https://en.wikipedia.org/wiki/Main_Page)
[Search](https://en.wikipedia.org/wiki/Special:Search "Search Wikipedia [f]")
Appearance
- [Donate](https://donate.wikimedia.org/?wmf_source=donate&wmf_medium=sidebar&wmf_campaign=en.wikipedia.org&uselang=en)
- [Create account](https://en.wikipedia.org/w/index.php?title=Special:CreateAccount&returnto=Inverse+trigonometric+functions "You are encouraged to create an account and log in; however, it is not mandatory")
- [Log in](https://en.wikipedia.org/w/index.php?title=Special:UserLogin&returnto=Inverse+trigonometric+functions "You're encouraged to log in; however, it's not mandatory. [o]")
Personal tools
- [Donate](https://donate.wikimedia.org/?wmf_source=donate&wmf_medium=sidebar&wmf_campaign=en.wikipedia.org&uselang=en)
- [Create account](https://en.wikipedia.org/w/index.php?title=Special:CreateAccount&returnto=Inverse+trigonometric+functions "You are encouraged to create an account and log in; however, it is not mandatory")
- [Log in](https://en.wikipedia.org/w/index.php?title=Special:UserLogin&returnto=Inverse+trigonometric+functions "You're encouraged to log in; however, it's not mandatory. [o]")
## Contents
move to sidebar
hide
- [(Top)](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions)
- [1 Notation](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Notation)
- [2 Basic concepts](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Basic_concepts)
Toggle Basic concepts subsection
- [2\.1 Principal values](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Principal_values)
- [2\.1.1 Domains](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Domains)
- [2\.2 Solutions to elementary trigonometric equations](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Solutions_to_elementary_trigonometric_equations)
- [2\.2.1 Detailed example and explanation of the "plus or minus" symbol ±](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Detailed_example_and_explanation_of_the_"plus_or_minus"_symbol_%C2%B1)
- [2\.2.2 Equal identical trigonometric functions](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Equal_identical_trigonometric_functions)
- [2\.3 Transforming equations](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Transforming_equations)
- [2\.4 Relationships between trigonometric functions and inverse trigonometric functions](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Relationships_between_trigonometric_functions_and_inverse_trigonometric_functions)
- [2\.5 Relationships among the inverse trigonometric functions](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Relationships_among_the_inverse_trigonometric_functions)
- [2\.6 Arctangent addition formula](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Arctangent_addition_formula)
- [3 In calculus](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#In_calculus)
Toggle In calculus subsection
- [3\.1 Derivatives of inverse trigonometric functions](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Derivatives_of_inverse_trigonometric_functions)
- [3\.2 Expression as definite integrals](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Expression_as_definite_integrals)
- [3\.3 Infinite series](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Infinite_series)
- [3\.3.1 Continued fractions for arctangent](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Continued_fractions_for_arctangent)
- [3\.4 Indefinite integrals of inverse trigonometric functions](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Indefinite_integrals_of_inverse_trigonometric_functions)
- [3\.4.1 Example](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Example)
- [4 Extension to the complex plane](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Extension_to_the_complex_plane)
Toggle Extension to the complex plane subsection
- [4\.1 Logarithmic forms](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Logarithmic_forms)
- [4\.1.1 Generalization](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Generalization)
- [4\.1.2 Example proof](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Example_proof)
- [5 Applications](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Applications)
Toggle Applications subsection
- [5\.1 Finding the angle of a right triangle](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Finding_the_angle_of_a_right_triangle)
- [5\.2 In computer science and engineering](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#In_computer_science_and_engineering)
- [5\.2.1 Two-argument variant of arctangent](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Two-argument_variant_of_arctangent)
- [5\.2.2 Arctangent function with location parameter](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Arctangent_function_with_location_parameter)
- [5\.2.3 Numerical accuracy](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Numerical_accuracy)
- [6 See also](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#See_also)
- [7 Notes](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Notes)
- [8 References](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#References)
- [9 External links](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#External_links)
Toggle the table of contents
# Inverse trigonometric functions
53 languages
- [العربية](https://ar.wikipedia.org/wiki/%D8%AF%D9%88%D8%A7%D9%84_%D9%85%D8%AB%D9%84%D8%AB%D9%8A%D8%A9_%D8%B9%D9%83%D8%B3%D9%8A%D8%A9 "دوال مثلثية عكسية – Arabic")
- [Azərbaycanca](https://az.wikipedia.org/wiki/T%C9%99rs_triqonometrik_funksiyalar "Tərs triqonometrik funksiyalar – Azerbaijani")
- [Башҡортса](https://ba.wikipedia.org/wiki/%D0%9A%D0%B8%D1%80%D0%B5_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D0%BA_%D1%84%D1%83%D0%BD%D0%BA%D1%86%D0%B8%D1%8F%D0%BB%D0%B0%D1%80 "Кире тригонометрик функциялар – Bashkir")
- [Български](https://bg.wikipedia.org/wiki/%D0%9E%D0%B1%D1%80%D0%B0%D1%82%D0%BD%D0%B8_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%87%D0%BD%D0%B8_%D1%84%D1%83%D0%BD%D0%BA%D1%86%D0%B8%D0%B8 "Обратни тригонометрични функции – Bulgarian")
- [বাংলা](https://bn.wikipedia.org/wiki/%E0%A6%AC%E0%A6%BF%E0%A6%AA%E0%A6%B0%E0%A7%80%E0%A6%A4_%E0%A6%A4%E0%A7%8D%E0%A6%B0%E0%A6%BF%E0%A6%95%E0%A7%8B%E0%A6%A3%E0%A6%AE%E0%A6%BF%E0%A6%A4%E0%A6%BF%E0%A6%95_%E0%A6%85%E0%A6%AA%E0%A7%87%E0%A6%95%E0%A7%8D%E0%A6%B7%E0%A6%95 "বিপরীত ত্রিকোণমিতিক অপেক্ষক – Bangla")
- [Català](https://ca.wikipedia.org/wiki/Inverses_de_les_funcions_trigonom%C3%A8triques "Inverses de les funcions trigonomètriques – Catalan")
- [کوردی](https://ckb.wikipedia.org/wiki/%D9%81%D8%A7%D9%86%DA%A9%D8%B4%D9%86%DB%95_%D8%B3%DB%8E%DA%AF%DB%86%D8%B4%DB%95%DB%8C%DB%8C%DB%8C%DB%95_%DA%BE%DB%95%DA%B5%DA%AF%DB%95%DA%95%D8%A7%D9%88%DB%95%DA%A9%D8%A7%D9%86 "فانکشنە سێگۆشەیییە ھەڵگەڕاوەکان – Central Kurdish")
- [Čeština](https://cs.wikipedia.org/wiki/Cyklometrick%C3%A1_funkce "Cyklometrická funkce – Czech")
- [Чӑвашла](https://cv.wikipedia.org/wiki/%D0%A2%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D0%BB%D0%BB%D0%B5_%D0%BA%D1%83%D1%82%C4%83%D0%BD%D0%BB%D0%B0_%D1%84%D1%83%D0%BD%D0%BA%D1%86%D0%B8%D1%81%D0%B5%D0%BC "Тригонометрилле кутăнла функцисем – Chuvash")
- [Dansk](https://da.wikipedia.org/wiki/Arcus-funktioner "Arcus-funktioner – Danish")
- [Deutsch](https://de.wikipedia.org/wiki/Arkusfunktion "Arkusfunktion – German")
- [Ελληνικά](https://el.wikipedia.org/wiki/%CE%91%CE%BD%CF%84%CE%AF%CF%83%CF%84%CF%81%CE%BF%CF%86%CE%B5%CF%82_%CF%84%CF%81%CE%B9%CE%B3%CF%89%CE%BD%CE%BF%CE%BC%CE%B5%CF%84%CF%81%CE%B9%CE%BA%CE%AD%CF%82_%CF%83%CF%85%CE%BD%CE%B1%CF%81%CF%84%CE%AE%CF%83%CE%B5%CE%B9%CF%82 "Αντίστροφες τριγωνομετρικές συναρτήσεις – Greek")
- [Esperanto](https://eo.wikipedia.org/wiki/Inversa_trigonometria_funkcio "Inversa trigonometria funkcio – Esperanto")
- [Español](https://es.wikipedia.org/wiki/Funci%C3%B3n_trigonom%C3%A9trica_inversa "Función trigonométrica inversa – Spanish")
- [Eesti](https://et.wikipedia.org/wiki/Arkusfunktsioonid "Arkusfunktsioonid – Estonian")
- [Euskara](https://eu.wikipedia.org/wiki/Alderantzizko_funtzio_trigonometriko "Alderantzizko funtzio trigonometriko – Basque")
- [فارسی](https://fa.wikipedia.org/wiki/%D8%AA%D9%88%D8%A7%D8%A8%D8%B9_%D9%85%D8%B9%DA%A9%D9%88%D8%B3_%D9%85%D8%AB%D9%84%D8%AB%D8%A7%D8%AA%DB%8C "توابع معکوس مثلثاتی – Persian")
- [Suomi](https://fi.wikipedia.org/wiki/Arkusfunktiot "Arkusfunktiot – Finnish")
- [Français](https://fr.wikipedia.org/wiki/Fonction_circulaire_r%C3%A9ciproque "Fonction circulaire réciproque – French")
- [Galego](https://gl.wikipedia.org/wiki/Funci%C3%B3ns_trigonom%C3%A9tricas_inversas "Funcións trigonométricas inversas – Galician")
- [עברית](https://he.wikipedia.org/wiki/%D7%A4%D7%95%D7%A0%D7%A7%D7%A6%D7%99%D7%95%D7%AA_%D7%98%D7%A8%D7%99%D7%92%D7%95%D7%A0%D7%95%D7%9E%D7%98%D7%A8%D7%99%D7%95%D7%AA_%D7%94%D7%A4%D7%95%D7%9B%D7%95%D7%AA "פונקציות טריגונומטריות הפוכות – Hebrew")
- [हिन्दी](https://hi.wikipedia.org/wiki/%E0%A4%AA%E0%A5%8D%E0%A4%B0%E0%A4%A4%E0%A4%BF%E0%A4%B2%E0%A5%8B%E0%A4%AE_%E0%A4%A4%E0%A5%8D%E0%A4%B0%E0%A4%BF%E0%A4%95%E0%A5%8B%E0%A4%A3%E0%A4%AE%E0%A4%BF%E0%A4%A4%E0%A5%80%E0%A4%AF_%E0%A4%AB%E0%A4%B2%E0%A4%A8 "प्रतिलोम त्रिकोणमितीय फलन – Hindi")
- [Hrvatski](https://hr.wikipedia.org/wiki/Arkus_funkcije "Arkus funkcije – Croatian")
- [Հայերեն](https://hy.wikipedia.org/wiki/%D5%80%D5%A1%D5%AF%D5%A1%D5%A4%D5%A1%D6%80%D5%B1_%D5%A5%D5%BC%D5%A1%D5%B6%D5%AF%D5%B5%D5%B8%D6%82%D5%B6%D5%A1%D5%B9%D5%A1%D6%83%D5%A1%D5%AF%D5%A1%D5%B6_%D6%86%D5%B8%D6%82%D5%B6%D5%AF%D6%81%D5%AB%D5%A1%D5%B6%D5%A5%D6%80 "Հակադարձ եռանկյունաչափական ֆունկցիաներ – Armenian")
- [Bahasa Indonesia](https://id.wikipedia.org/wiki/Fungsi_invers_trigonometri "Fungsi invers trigonometri – Indonesian")
- [Italiano](https://it.wikipedia.org/wiki/Funzione_trigonometrica_inversa "Funzione trigonometrica inversa – Italian")
- [日本語](https://ja.wikipedia.org/wiki/%E9%80%86%E4%B8%89%E8%A7%92%E9%96%A2%E6%95%B0 "逆三角関数 – Japanese")
- [Қазақша](https://kk.wikipedia.org/wiki/%D0%9A%D0%B5%D1%80%D1%96_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%8F%D0%BB%D1%8B%D2%9B_%D1%84%D1%83%D0%BD%D0%BA%D1%86%D0%B8%D1%8F%D0%BB%D0%B0%D1%80 "Кері тригонометриялық функциялар – Kazakh")
- [ភាសាខ្មែរ](https://km.wikipedia.org/wiki/%E1%9E%A2%E1%9E%93%E1%9E%BB%E1%9E%82%E1%9E%98%E1%9E%93%E1%9F%8D%E1%9E%8F%E1%9F%92%E1%9E%9A%E1%9E%B8%E1%9E%80%E1%9F%84%E1%9E%8E%E1%9E%98%E1%9E%B6%E1%9E%8F%E1%9F%92%E1%9E%9A%E1%9E%85%E1%9F%92%E1%9E%9A%E1%9E%B6%E1%9E%9F%E1%9F%8B "អនុគមន៍ត្រីកោណមាត្រច្រាស់ – Khmer")
- [한국어](https://ko.wikipedia.org/wiki/%EC%97%AD%EC%82%BC%EA%B0%81_%ED%95%A8%EC%88%98 "역삼각 함수 – Korean")
- [Кыргызча](https://ky.wikipedia.org/wiki/%D0%90%D1%80%D0%BA%D1%84%D0%B5%D0%BD%D0%BA%D1%86%D0%B8%D1%8F "Аркфенкция – Kyrgyz")
- [Latina](https://la.wikipedia.org/wiki/Functiones_trigonometricae_inversae "Functiones trigonometricae inversae – Latin")
- [Latviešu](https://lv.wikipedia.org/wiki/Invers%C4%81s_trigonometrisk%C4%81s_funkcijas "Inversās trigonometriskās funkcijas – Latvian")
- [Македонски](https://mk.wikipedia.org/wiki/%D0%98%D0%BD%D0%B2%D0%B5%D1%80%D0%B7%D0%BD%D0%B8_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%81%D0%BA%D0%B8_%D1%84%D1%83%D0%BD%D0%BA%D1%86%D0%B8%D0%B8 "Инверзни тригонометриски функции – Macedonian")
- [Nederlands](https://nl.wikipedia.org/wiki/Cyclometrische_functie "Cyclometrische functie – Dutch")
- [Norsk nynorsk](https://nn.wikipedia.org/wiki/Arcus-funksjon "Arcus-funksjon – Norwegian Nynorsk")
- [Norsk bokmål](https://no.wikipedia.org/wiki/Inverse_trigonometriske_funksjoner "Inverse trigonometriske funksjoner – Norwegian Bokmål")
- [Polski](https://pl.wikipedia.org/wiki/Funkcje_cyklometryczne "Funkcje cyklometryczne – Polish")
- [Português](https://pt.wikipedia.org/wiki/Fun%C3%A7%C3%B5es_trigonom%C3%A9tricas_inversas "Funções trigonométricas inversas – Portuguese")
- [Русский](https://ru.wikipedia.org/wiki/%D0%9E%D0%B1%D1%80%D0%B0%D1%82%D0%BD%D1%8B%D0%B5_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B5_%D1%84%D1%83%D0%BD%D0%BA%D1%86%D0%B8%D0%B8 "Обратные тригонометрические функции – Russian")
- [Srpskohrvatski / српскохрватски](https://sh.wikipedia.org/wiki/Inverzne_trigonometrijske_funkcije "Inverzne trigonometrijske funkcije – Serbo-Croatian")
- [සිංහල](https://si.wikipedia.org/wiki/%E0%B6%B4%E0%B7%8A%E2%80%8D%E0%B6%BB%E0%B6%AD%E0%B7%92%E0%B6%BD%E0%B7%9D%E0%B6%B8_%E0%B6%AD%E0%B7%8A%E2%80%8D%E0%B6%BB%E0%B7%92%E0%B6%9A%E0%B7%9D%E0%B6%AB%E0%B6%B8%E0%B7%92%E0%B6%AD%E0%B7%92%E0%B6%9A_%E0%B7%81%E0%B7%8A%E2%80%8D%E0%B6%BB%E0%B7%92%E0%B6%AD "ප්රතිලෝම ත්රිකෝණමිතික ශ්රිත – Sinhala")
- [Slovenčina](https://sk.wikipedia.org/wiki/Cyklometrick%C3%A1_funkcia "Cyklometrická funkcia – Slovak")
- [Slovenščina](https://sl.wikipedia.org/wiki/Kro%C5%BEna_funkcija "Krožna funkcija – Slovenian")
- [Српски / srpski](https://sr.wikipedia.org/wiki/%D0%98%D0%BD%D0%B2%D0%B5%D1%80%D0%B7%D0%BD%D0%B5_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%98%D1%81%D0%BA%D0%B5_%D1%84%D1%83%D0%BD%D0%BA%D1%86%D0%B8%D1%98%D0%B5 "Инверзне тригонометријске функције – Serbian")
- [தமிழ்](https://ta.wikipedia.org/wiki/%E0%AE%A8%E0%AF%87%E0%AE%B0%E0%AF%8D%E0%AE%AE%E0%AE%BE%E0%AE%B1%E0%AF%81_%E0%AE%AE%E0%AF%81%E0%AE%95%E0%AF%8D%E0%AE%95%E0%AF%8B%E0%AE%A3%E0%AE%B5%E0%AE%BF%E0%AE%AF%E0%AE%B2%E0%AF%8D_%E0%AE%9A%E0%AE%BE%E0%AE%B0%E0%AF%8D%E0%AE%AA%E0%AF%81%E0%AE%95%E0%AE%B3%E0%AF%8D "நேர்மாறு முக்கோணவியல் சார்புகள் – Tamil")
- [ไทย](https://th.wikipedia.org/wiki/%E0%B8%9F%E0%B8%B1%E0%B8%87%E0%B8%81%E0%B9%8C%E0%B8%8A%E0%B8%B1%E0%B8%99%E0%B8%95%E0%B8%A3%E0%B8%B5%E0%B9%82%E0%B8%81%E0%B8%93%E0%B8%A1%E0%B8%B4%E0%B8%95%E0%B8%B4%E0%B8%9C%E0%B8%81%E0%B8%9C%E0%B8%B1%E0%B8%99 "ฟังก์ชันตรีโกณมิติผกผัน – Thai")
- [Türkçe](https://tr.wikipedia.org/wiki/Ters_trigonometrik_fonksiyonlar "Ters trigonometrik fonksiyonlar – Turkish")
- [Українська](https://uk.wikipedia.org/wiki/%D0%9E%D0%B1%D0%B5%D1%80%D0%BD%D0%B5%D0%BD%D1%96_%D1%82%D1%80%D0%B8%D0%B3%D0%BE%D0%BD%D0%BE%D0%BC%D0%B5%D1%82%D1%80%D0%B8%D1%87%D0%BD%D1%96_%D1%84%D1%83%D0%BD%D0%BA%D1%86%D1%96%D1%97 "Обернені тригонометричні функції – Ukrainian")
- [Tiếng Việt](https://vi.wikipedia.org/wiki/C%C3%A1c_h%C3%A0m_l%C6%B0%E1%BB%A3ng_gi%C3%A1c_ng%C6%B0%E1%BB%A3c "Các hàm lượng giác ngược – Vietnamese")
- [閩南語 / Bân-lâm-gí](https://zh-min-nan.wikipedia.org/wiki/Ge%CC%8Dk-sa%E2%81%BF-kak_h%C3%A2m-s%C3%B2%CD%98 "Ge̍k-saⁿ-kak hâm-sò͘ – Minnan")
- [粵語](https://zh-yue.wikipedia.org/wiki/%E5%8F%8D%E4%B8%89%E8%A7%92%E5%87%BD%E6%95%B8 "反三角函數 – Cantonese")
- [中文](https://zh.wikipedia.org/wiki/%E5%8F%8D%E4%B8%89%E8%A7%92%E5%87%BD%E6%95%B0 "反三角函数 – Chinese")
[Edit links](https://www.wikidata.org/wiki/Special:EntityPage/Q674533#sitelinks-wikipedia "Edit interlanguage links")
- [Article](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions "View the content page [c]")
- [Talk](https://en.wikipedia.org/wiki/Talk:Inverse_trigonometric_functions "Discuss improvements to the content page [t]")
English
- [Read](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions)
- [Edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit "Edit this page [e]")
- [View history](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=history "Past revisions of this page [h]")
Tools
Tools
move to sidebar
hide
Actions
- [Read](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions)
- [Edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit "Edit this page [e]")
- [View history](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=history)
General
- [What links here](https://en.wikipedia.org/wiki/Special:WhatLinksHere/Inverse_trigonometric_functions "List of all English Wikipedia pages containing links to this page [j]")
- [Related changes](https://en.wikipedia.org/wiki/Special:RecentChangesLinked/Inverse_trigonometric_functions "Recent changes in pages linked from this page [k]")
- [Upload file](https://en.wikipedia.org/wiki/Wikipedia:File_Upload_Wizard "Upload files [u]")
- [Permanent link](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&oldid=1343100340 "Permanent link to this revision of this page")
- [Page information](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=info "More information about this page")
- [Cite this page](https://en.wikipedia.org/w/index.php?title=Special:CiteThisPage&page=Inverse_trigonometric_functions&id=1343100340&wpFormIdentifier=titleform "Information on how to cite this page")
- [Get shortened URL](https://en.wikipedia.org/w/index.php?title=Special:UrlShortener&url=https%3A%2F%2Fen.wikipedia.org%2Fwiki%2FInverse_trigonometric_functions)
Print/export
- [Download as PDF](https://en.wikipedia.org/w/index.php?title=Special:DownloadAsPdf&page=Inverse_trigonometric_functions&action=show-download-screen "Download this page as a PDF file")
- [Printable version](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&printable=yes "Printable version of this page [p]")
In other projects
- [Wikimedia Commons](https://commons.wikimedia.org/wiki/Category:Inverse_trigonometric_functions)
- [Wikibooks](https://en.wikibooks.org/wiki/Trigonometry/Inverse_Trigonometric_Functions)
- [Wikidata item](https://www.wikidata.org/wiki/Special:EntityPage/Q674533 "Structured data on this page hosted by Wikidata [g]")
Appearance
move to sidebar
hide
From Wikipedia, the free encyclopedia
Inverse functions of sin, cos, tan, etc.
| [Trigonometry](https://en.wikipedia.org/wiki/Trigonometry "Trigonometry") |
|---|
| [](https://en.wikipedia.org/wiki/File:Trig_Functions.svg) |
| [Outline](https://en.wikipedia.org/wiki/Outline_of_trigonometry "Outline of trigonometry") [History](https://en.wikipedia.org/wiki/History_of_trigonometry "History of trigonometry") [Usage](https://en.wikipedia.org/wiki/Uses_of_trigonometry "Uses of trigonometry") [Functions](https://en.wikipedia.org/wiki/Trigonometric_functions "Trigonometric functions") ([sin](https://en.wikipedia.org/wiki/Sine_and_cosine "Sine and cosine"), [cos](https://en.wikipedia.org/wiki/Sine_and_cosine "Sine and cosine"), [tan](https://en.wikipedia.org/wiki/Trigonometric_functions#tangent "Trigonometric functions"), [inverse]()) [Generalized trigonometry](https://en.wikipedia.org/wiki/Generalized_trigonometry "Generalized trigonometry") |
| Reference |
| [Identities](https://en.wikipedia.org/wiki/List_of_trigonometric_identities "List of trigonometric identities") [Exact constants](https://en.wikipedia.org/wiki/Exact_trigonometric_values "Exact trigonometric values") [Tables](https://en.wikipedia.org/wiki/Trigonometric_tables "Trigonometric tables") [Unit circle](https://en.wikipedia.org/wiki/Unit_circle "Unit circle") |
| Laws and theorems |
| [Sines](https://en.wikipedia.org/wiki/Law_of_sines "Law of sines") [Cosines](https://en.wikipedia.org/wiki/Law_of_cosines "Law of cosines") [Pythagorean theorem](https://en.wikipedia.org/wiki/Pythagorean_theorem "Pythagorean theorem") [Tangents](https://en.wikipedia.org/wiki/Law_of_tangents "Law of tangents") [Cotangents](https://en.wikipedia.org/wiki/Law_of_cotangents "Law of cotangents") |
| [Calculus](https://en.wikipedia.org/wiki/Calculus "Calculus") |
| [Trigonometric substitution](https://en.wikipedia.org/wiki/Trigonometric_substitution "Trigonometric substitution") [Integrals](https://en.wikipedia.org/wiki/List_of_integrals_of_trigonometric_functions "List of integrals of trigonometric functions") ([inverse functions](https://en.wikipedia.org/wiki/List_of_integrals_of_inverse_trigonometric_functions "List of integrals of inverse trigonometric functions")) [Derivatives](https://en.wikipedia.org/wiki/Differentiation_of_trigonometric_functions "Differentiation of trigonometric functions") [Trigonometric series](https://en.wikipedia.org/wiki/Trigonometric_series "Trigonometric series") |
| Mathematicians |
| [Hipparchus](https://en.wikipedia.org/wiki/Hipparchus "Hipparchus") [Ptolemy](https://en.wikipedia.org/wiki/Ptolemy "Ptolemy") [Brahmagupta](https://en.wikipedia.org/wiki/Brahmagupta "Brahmagupta") [al-Hasib](https://en.wikipedia.org/wiki/Habash_al-Hasib_al-Marwazi "Habash al-Hasib al-Marwazi") [al-Battani](https://en.wikipedia.org/wiki/Al-Battani "Al-Battani") [Regiomontanus](https://en.wikipedia.org/wiki/Regiomontanus "Regiomontanus") [Viète](https://en.wikipedia.org/wiki/Fran%C3%A7ois_Vi%C3%A8te "François Viète") [de Moivre](https://en.wikipedia.org/wiki/Abraham_de_Moivre "Abraham de Moivre") [Euler](https://en.wikipedia.org/wiki/Leonhard_Euler "Leonhard Euler") [Fourier](https://en.wikipedia.org/wiki/Joseph_Fourier "Joseph Fourier") |
| [v](https://en.wikipedia.org/wiki/Template:Trigonometry "Template:Trigonometry") [t](https://en.wikipedia.org/wiki/Template_talk:Trigonometry "Template talk:Trigonometry") [e](https://en.wikipedia.org/wiki/Special:EditPage/Template:Trigonometry "Special:EditPage/Template:Trigonometry") |
"Arctangent" redirects here. For other uses, see [Arctangent (disambiguation)](https://en.wikipedia.org/wiki/Arctangent_\(disambiguation\) "Arctangent (disambiguation)").
In [mathematics](https://en.wikipedia.org/wiki/Mathematics "Mathematics"), the **inverse trigonometric functions** (occasionally also called *antitrigonometric*,[\[1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Hall_1909-1) *cyclometric*,[\[2\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-cyclometric-2) or *arcus* functions[\[3\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-arcus-3)) are the [inverse functions](https://en.wikipedia.org/wiki/Inverse_function "Inverse function") of the [trigonometric functions](https://en.wikipedia.org/wiki/Trigonometric_functions "Trigonometric functions"), under suitably restricted [domains](https://en.wikipedia.org/wiki/Domain_of_a_function "Domain of a function"). Specifically, they are the inverses of the [sine](https://en.wikipedia.org/wiki/Sine "Sine"), [cosine](https://en.wikipedia.org/wiki/Cosine "Cosine"), [tangent](https://en.wikipedia.org/wiki/Tangent_\(trigonometry\) "Tangent (trigonometry)"), [cotangent](https://en.wikipedia.org/wiki/Cotangent "Cotangent"), [secant](https://en.wikipedia.org/wiki/Secant_\(trigonometry\) "Secant (trigonometry)"), and [cosecant](https://en.wikipedia.org/wiki/Cosecant "Cosecant") functions,[\[4\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-4) and are used to obtain an angle from any of the angle's trigonometric ratios. Inverse trigonometric functions are widely used in [engineering](https://en.wikipedia.org/wiki/Engineering "Engineering"), [navigation](https://en.wikipedia.org/wiki/Navigation "Navigation"), [physics](https://en.wikipedia.org/wiki/Physics "Physics"), and [geometry](https://en.wikipedia.org/wiki/Geometry "Geometry").
## Notation
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=1 "Edit section: Notation")\]
[](https://en.wikipedia.org/wiki/File:Arcsin_and_arccos_as_actual_arc_lengths.svg)
For a circle of radius 1, arcsin and arccos are the lengths of actual arcs determined by the quantities in question.
See also: [Trigonometric functions § Notation](https://en.wikipedia.org/wiki/Trigonometric_functions#Notation "Trigonometric functions")
Several notations for the inverse trigonometric functions exist. The most common convention is to name inverse trigonometric functions using an arc- prefix: arcsin(*x*), arccos(*x*), arctan(*x*), etc.[\[1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Hall_1909-1) (This convention is used throughout this article.) This notation arises from the following geometric relationships:\[*[citation needed](https://en.wikipedia.org/wiki/Wikipedia:Citation_needed "Wikipedia:Citation needed")*\] when measuring in radians, an angle of θ radians will correspond to an [arc](https://en.wikipedia.org/wiki/Circular_arc "Circular arc") whose length is rθ, where r is the radius of the circle. Thus in the [unit circle](https://en.wikipedia.org/wiki/Unit_circle "Unit circle"), the cosine of x function is both the arc and the angle, because the arc of a circle of radius 1 is the same as the angle. Or, "the arc whose cosine is x" is the same as "the angle whose cosine is x", because the length of the arc of the circle in radii is the same as the measurement of the angle in radians.[\[5\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Americana_1912-5) In computer programming languages, the inverse trigonometric functions are often called by the abbreviated forms asin, acos, atan.[\[6\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-6)
The notations sin−1(*x*), cos−1(*x*), tan−1(*x*), etc., as introduced by [John Herschel](https://en.wikipedia.org/wiki/John_Herschel "John Herschel") in 1813,[\[7\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Cajori-7)[\[8\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Herschel_1813-8) are often used as well in English-language sources,[\[1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Hall_1909-1) much more than the also [established](https://en.wikipedia.org/wiki/Iterated_function#Definition "Iterated function") sin\[−1\](*x*), cos\[−1\](*x*), tan\[−1\](*x*) – conventions consistent with the notation of an [inverse function](https://en.wikipedia.org/wiki/Inverse_function "Inverse function"), that is useful (for example) to define the [multivalued](https://en.wikipedia.org/wiki/Multivalued_function "Multivalued function") version of each inverse trigonometric function: tan − 1 ( x ) \= { arctan ( x ) \+ π k ∣ k ∈ Z } . {\\displaystyle \\tan ^{-1}(x)=\\{\\arctan(x)+\\pi k\\mid k\\in \\mathbb {Z} \\}~.}  However, this might appear to conflict logically with the common semantics for expressions such as sin2(*x*) (although only sin2 *x*, without parentheses, is the really common use), which refer to numeric power rather than [function composition](https://en.wikipedia.org/wiki/Function_composition "Function composition"), and therefore may result in confusion between notation for the [reciprocal](https://en.wikipedia.org/wiki/Reciprocal_\(mathematics\) "Reciprocal (mathematics)") ([multiplicative inverse](https://en.wikipedia.org/wiki/Multiplicative_inverse "Multiplicative inverse")) and [inverse function](https://en.wikipedia.org/wiki/Inverse_function "Inverse function").[\[9\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-9)
The confusion is somewhat mitigated by the fact that each of the reciprocal trigonometric functions has its own name — for example, (cos(*x*))−1 = sec(*x*). Nevertheless, certain authors advise against using it, since it is ambiguous.[\[1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Hall_1909-1)[\[10\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Korn_2000-10) Another precarious convention used by a small number of authors is to use an [uppercase](https://en.wikipedia.org/wiki/UPPERCASE "UPPERCASE") first letter, along with a “−1” superscript: Sin−1(*x*), Cos−1(*x*), Tan−1(*x*), etc.[\[11\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Bhatti_1999-11) Although it is intended to avoid confusion with the [reciprocal](https://en.wikipedia.org/wiki/Reciprocal_\(mathematics\) "Reciprocal (mathematics)"), which should be represented by sin−1(*x*), cos−1(*x*), etc., or, better, by sin−1 *x*, cos−1 *x*, etc., it in turn creates yet another major source of ambiguity, especially since many popular high-level programming languages (e.g. [Mathematica](https://en.wikipedia.org/wiki/Mathematica "Mathematica") and [MAGMA](https://en.wikipedia.org/wiki/Magma_\(computer_algebra_system\) "Magma (computer algebra system)")) use those very same capitalised representations for the standard trig functions, whereas others ([Python](https://en.wikipedia.org/wiki/Python_\(programming_language\) "Python (programming language)"), [SymPy](https://en.wikipedia.org/wiki/SymPy "SymPy"), [NumPy](https://en.wikipedia.org/wiki/NumPy "NumPy"), [Matlab](https://en.wikipedia.org/wiki/Matlab "Matlab"), [MAPLE](https://en.wikipedia.org/wiki/Maple_\(software\) "Maple (software)"), etc.) use lower-case.
Hence, since 2009, the [ISO 80000-2](https://en.wikipedia.org/wiki/ISO_80000-2#Part_2:_Mathematics "ISO 80000-2") standard has specified solely the "arc" prefix for the inverse functions.
## Basic concepts
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=2 "Edit section: Basic concepts")\]
[](https://en.wikipedia.org/wiki/File:TrigFunctionDiagram.svg)
The points labelled 1,
Sec(*θ*),
Csc(*θ*) represent the length of the line segment from the origin to that point.
Sin(*θ*),
Tan(*θ*), and
1 are the heights to the line starting from the x\-axis, while
Cos(*θ*),
1, and
Cot(*θ*) are lengths along the x\-axis starting from the origin.
### Principal values
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=3 "Edit section: Principal values")\]
Since none of the six trigonometric functions are [one-to-one](https://en.wikipedia.org/wiki/One-to-one_function "One-to-one function"), they must be restricted in order to have inverse functions. Therefore, the result [ranges](https://en.wikipedia.org/wiki/Range_of_a_function "Range of a function") of the inverse functions are proper (i.e. strict) [subsets](https://en.wikipedia.org/wiki/Subset "Subset") of the domains of the original functions.
For example, using *function* in the sense of [multivalued functions](https://en.wikipedia.org/wiki/Multivalued_function "Multivalued function"), just as the [square root](https://en.wikipedia.org/wiki/Square_root "Square root") function y \= x {\\displaystyle y={\\sqrt {x}}}  could be defined from y 2 \= x , {\\displaystyle y^{2}=x,}  the function y \= arcsin ( x ) {\\displaystyle y=\\arcsin(x)}  is defined so that sin ( y ) \= x . {\\displaystyle \\sin(y)=x.}  For a given [real number](https://en.wikipedia.org/wiki/Real_number "Real number") x , {\\displaystyle x,}  with − 1 ≤ x ≤ 1 , {\\displaystyle -1\\leq x\\leq 1,}  there are multiple (in fact, [countably infinitely](https://en.wikipedia.org/wiki/Countably_infinite "Countably infinite") many) numbers y {\\displaystyle y}  such that sin ( y ) \= x {\\displaystyle \\sin(y)=x} ; for example, sin ( 0 ) \= 0 , {\\displaystyle \\sin(0)=0,}  but also sin ( π ) \= 0 , {\\displaystyle \\sin(\\pi )=0,}  sin ( 2 π ) \= 0 , {\\displaystyle \\sin(2\\pi )=0,}  etc. When only one value is desired, the function may be restricted to its [principal branch](https://en.wikipedia.org/wiki/Principal_branch "Principal branch"). With this restriction, for each x {\\displaystyle x}  in the domain, the expression arcsin ( x ) {\\displaystyle \\arcsin(x)}  will evaluate only to a single value, called its [principal value](https://en.wikipedia.org/wiki/Principal_value "Principal value"). These properties apply to all the inverse trigonometric functions.
The principal inverses are listed in the following table.
| Name | Usual notation | Definition | Domain of x for real result | Range of usual principal value ([radians](https://en.wikipedia.org/wiki/Radian "Radian")) | Range of usual principal value ([degrees](https://en.wikipedia.org/wiki/Degree_\(angle\) "Degree (angle)")) |
|---|---|---|---|---|---|
| arcsine | *y* = arcsin(*x*) | *x* = [sin](https://en.wikipedia.org/wiki/Sine "Sine")(*y*) | −1 ≤ *x* ≤ 1 | −π/2 ≤ *y* ≤ π/2 | −90° ≤ *y* ≤ 90° |
| arccosine | *y* = arccos(*x*) | *x* = [cos](https://en.wikipedia.org/wiki/Cosine "Cosine")(*y*) | −1 ≤ *x* ≤ 1 | 0 ≤ *y* ≤ π | 0° ≤ *y* ≤ 180° |
| arctangent | *y* = arctan(*x*) | *x* = [tan](https://en.wikipedia.org/wiki/Tangent_\(trigonometry\) "Tangent (trigonometry)")(*y*) | all real numbers | − π/2 \< *y* \< π/2 | −90° \< *y* \< 90° |
| arccotangent | *y* = arccot(*x*) | *x* = [cot](https://en.wikipedia.org/wiki/Cotangent "Cotangent")(*y*) | all real numbers | 0 \< *y* \< π | 0° \< *y* \< 180° |
| arcsecant | *y* = arcsec(*x*) | *x* = [sec](https://en.wikipedia.org/wiki/Secant_\(trigonometry\) "Secant (trigonometry)")(*y*) | \|*x*\| ≥ 1 | 0 ≤ *y* \< π/2 or π/2 \< *y* ≤ π | 0° ≤ *y* \< 90° or 90° \< *y* ≤ 180° |
| arccosecant | *y* = arccsc(*x*) | *x* = [csc](https://en.wikipedia.org/wiki/Cosecant "Cosecant")(*y*) | \|*x*\| ≥ 1 | − π/2 ≤ *y* \< 0 or 0 \< *y* ≤ π/2 | −90° ≤ *y* \< 0 or 0° \< *y* ≤ 90° |
Note: Some authors define the range of arcsecant to be ( 0 ≤ y \< π 2 {\\textstyle 0\\leq y\<{\\frac {\\pi }{2}}}  or π ≤ y \< 3 π 2 {\\textstyle \\pi \\leq y\<{\\frac {3\\pi }{2}}}  ),[\[12\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-12) because the tangent function is nonnegative on this domain. This makes some computations more consistent. For example, using this range, tan ( arcsec ( x ) ) \= x 2 − 1 , {\\displaystyle \\tan(\\operatorname {arcsec}(x))={\\sqrt {x^{2}-1}},}  whereas with the range ( 0 ≤ y \< π 2 {\\textstyle 0\\leq y\<{\\frac {\\pi }{2}}}  or π 2 \< y ≤ π {\\textstyle {\\frac {\\pi }{2}}\<y\\leq \\pi }  ), we would have to write tan ( arcsec ( x ) ) \= ± x 2 − 1 , {\\displaystyle \\tan(\\operatorname {arcsec}(x))=\\pm {\\sqrt {x^{2}-1}},}  since tangent is nonnegative on 0 ≤ y \< π 2 , {\\textstyle 0\\leq y\<{\\frac {\\pi }{2}},}  but nonpositive on π 2 \< y ≤ π . {\\textstyle {\\frac {\\pi }{2}}\<y\\leq \\pi .}  For a similar reason, the same authors define the range of arccosecant to be ( − π \< y ≤ − π 2 {\\textstyle (-\\pi \<y\\leq -{\\frac {\\pi }{2}}}  or 0 \< y ≤ π 2 ) . {\\textstyle 0\<y\\leq {\\frac {\\pi }{2}}).} 
#### Domains
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=4 "Edit section: Domains")\]
If x is allowed to be a [complex number](https://en.wikipedia.org/wiki/Complex_number "Complex number"), then the range of y applies only to its real part.
The table below displays names and domains of the inverse trigonometric functions along with the [range](https://en.wikipedia.org/wiki/Image_of_a_function "Image of a function") of their usual [principal values](https://en.wikipedia.org/wiki/Principal_value "Principal value") in [radians](https://en.wikipedia.org/wiki/Radians "Radians").
| Name | Symbol | | [Domain](https://en.wikipedia.org/wiki/Domain_of_a_function "Domain of a function") | | [Image/Range](https://en.wikipedia.org/wiki/Image_of_a_function "Image of a function") | Inverse function | | Domain | | [Image](https://en.wikipedia.org/wiki/Image_of_a_function "Image of a function") of [principal values](https://en.wikipedia.org/wiki/Principal_value "Principal value") |
|---|---|---|---|---|---|---|---|---|---|---|
| [sine](https://en.wikipedia.org/wiki/Sine "Sine") | sin {\\displaystyle \\sin }  | | | | | | | | | |
The symbol R \= ( − ∞ , ∞ ) {\\displaystyle \\mathbb {R} =(-\\infty ,\\infty )}  denotes the set of all [real numbers](https://en.wikipedia.org/wiki/Real_number "Real number") and Z \= { … , − 2 , − 1 , 0 , 1 , 2 , … } {\\displaystyle \\mathbb {Z} =\\{\\ldots ,\\,-2,\\,-1,\\,0,\\,1,\\,2,\\,\\ldots \\}}  denotes the set of all [integers](https://en.wikipedia.org/wiki/Integer "Integer"). The set of all integer multiples of π {\\displaystyle \\pi }  is denoted by
π Z := { π n : n ∈ Z } \= { … , − 2 π , − π , 0 , π , 2 π , … } . {\\displaystyle \\pi \\mathbb {Z} ~:=~\\{\\pi n\\;:\\;n\\in \\mathbb {Z} \\}~=~\\{\\ldots ,\\,-2\\pi ,\\,-\\pi ,\\,0,\\,\\pi ,\\,2\\pi ,\\,\\ldots \\}.} 
The symbol ∖ {\\displaystyle \\,\\setminus \\,}  denotes [set subtraction](https://en.wikipedia.org/wiki/Set_subtraction "Set subtraction") so that, for instance, R ∖ ( − 1 , 1 ) \= ( − ∞ , − 1 \] ∪ \[ 1 , ∞ ) {\\displaystyle \\mathbb {R} \\setminus (-1,1)=(-\\infty ,-1\]\\cup \[1,\\infty )} ![{\\displaystyle \\mathbb {R} \\setminus (-1,1)=(-\\infty ,-1\]\\cup \[1,\\infty )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/105fc2887189c9dbf0d165542a768dcd97f03069) is the set of points in R {\\displaystyle \\mathbb {R} }  (that is, real numbers) that are *not* in the interval ( − 1 , 1 ) . {\\displaystyle (-1,1).} 
The [Minkowski sum](https://en.wikipedia.org/wiki/Minkowski_sum "Minkowski sum") notation π Z \+ ( 0 , π ) {\\textstyle \\pi \\mathbb {Z} +(0,\\pi )}  and π Z \+ ( − π 2 , π 2 ) {\\displaystyle \\pi \\mathbb {Z} +{\\bigl (}{-{\\tfrac {\\pi }{2}}},{\\tfrac {\\pi }{2}}{\\bigr )}}  that is used above to concisely write the domains of cot , csc , tan , and sec {\\displaystyle \\cot ,\\csc ,\\tan ,{\\text{ and }}\\sec }  is now explained.
**Domain of cotangent cot {\\displaystyle \\cot }  and cosecant csc {\\displaystyle \\csc } **: The domains of cot {\\displaystyle \\,\\cot \\,}  and csc {\\displaystyle \\,\\csc \\,}  are the same. They are the set of all angles θ {\\displaystyle \\theta }  at which sin θ ≠ 0 , {\\displaystyle \\sin \\theta \\neq 0,}  i.e. all real numbers that are *not* of the form π n {\\displaystyle \\pi n}  for some integer n , {\\displaystyle n,} 
π Z \+ ( 0 , π ) \= ⋯ ∪ ( − 2 π , − π ) ∪ ( − π , 0 ) ∪ ( 0 , π ) ∪ ( π , 2 π ) ∪ ⋯ \= R ∖ π Z {\\displaystyle {\\begin{aligned}\\pi \\mathbb {Z} +(0,\\pi )&=\\cdots \\cup (-2\\pi ,-\\pi )\\cup (-\\pi ,0)\\cup (0,\\pi )\\cup (\\pi ,2\\pi )\\cup \\cdots \\\\&=\\mathbb {R} \\setminus \\pi \\mathbb {Z} \\end{aligned}}} 
**Domain of tangent tan {\\displaystyle \\tan }  and secant sec {\\displaystyle \\sec } **: The domains of tan {\\displaystyle \\,\\tan \\,}  and sec {\\displaystyle \\,\\sec \\,}  are the same. They are the set of all angles θ {\\displaystyle \\theta }  at which cos θ ≠ 0 , {\\displaystyle \\cos \\theta \\neq 0,} 
π Z \+ ( − π 2 , π 2 ) \= ⋯ ∪ ( − 3 π 2 , − π 2 ) ∪ ( − π 2 , π 2 ) ∪ ( π 2 , 3 π 2 ) ∪ ⋯ \= R ∖ ( π 2 \+ π Z ) {\\displaystyle {\\begin{aligned}\\pi \\mathbb {Z} +\\left(-{\\tfrac {\\pi }{2}},{\\tfrac {\\pi }{2}}\\right)&=\\cdots \\cup {\\bigl (}{-{\\tfrac {3\\pi }{2}}},{-{\\tfrac {\\pi }{2}}}{\\bigr )}\\cup {\\bigl (}{-{\\tfrac {\\pi }{2}}},{\\tfrac {\\pi }{2}}{\\bigr )}\\cup {\\bigl (}{\\tfrac {\\pi }{2}},{\\tfrac {3\\pi }{2}}{\\bigr )}\\cup \\cdots \\\\&=\\mathbb {R} \\setminus \\left({\\tfrac {\\pi }{2}}+\\pi \\mathbb {Z} \\right)\\\\\\end{aligned}}} 
### Solutions to elementary trigonometric equations
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=5 "Edit section: Solutions to elementary trigonometric equations")\]
Each of the trigonometric functions is periodic in the real part of its argument, running through all its values twice in each interval of 2 π : {\\displaystyle 2\\pi :} 
- Sine and cosecant begin their period at
2
π
k
−
π
2
{\\textstyle 2\\pi k-{\\frac {\\pi }{2}}}

(where
k
{\\displaystyle k}

is an integer), finish it at
2
π
k
\+
π
2
,
{\\textstyle 2\\pi k+{\\frac {\\pi }{2}},}

and then reverse themselves over
2
π
k
\+
π
2
{\\textstyle 2\\pi k+{\\frac {\\pi }{2}}}

to
2
π
k
\+
3
π
2
.
{\\textstyle 2\\pi k+{\\frac {3\\pi }{2}}.}

- Cosine and secant begin their period at
2
π
k
,
{\\displaystyle 2\\pi k,}

finish it at
2
π
k
\+
π
.
{\\displaystyle 2\\pi k+\\pi .}

and then reverse themselves over
2
π
k
\+
π
{\\displaystyle 2\\pi k+\\pi }

to
2
π
k
\+
2
π
.
{\\displaystyle 2\\pi k+2\\pi .}

- Tangent begins its period at
2
π
k
−
π
2
,
{\\textstyle 2\\pi k-{\\frac {\\pi }{2}},}

finishes it at
2
π
k
\+
π
2
,
{\\textstyle 2\\pi k+{\\frac {\\pi }{2}},}

and then repeats it (forward) over
2
π
k
\+
π
2
{\\textstyle 2\\pi k+{\\frac {\\pi }{2}}}

to
2
π
k
\+
3
π
2
.
{\\textstyle 2\\pi k+{\\frac {3\\pi }{2}}.}

- Cotangent begins its period at
2
π
k
,
{\\displaystyle 2\\pi k,}

finishes it at
2
π
k
\+
π
,
{\\displaystyle 2\\pi k+\\pi ,}

and then repeats it (forward) over
2
π
k
\+
π
{\\displaystyle 2\\pi k+\\pi }

to
2
π
k
\+
2
π
.
{\\displaystyle 2\\pi k+2\\pi .}

This periodicity is reflected in the general inverses, where k {\\displaystyle k}  is some integer.
The following table shows how inverse trigonometric functions may be used to solve equalities involving the six standard trigonometric functions. It is assumed that the given values θ , {\\displaystyle \\theta ,}  r , {\\displaystyle r,}  s , {\\displaystyle s,}  x , {\\displaystyle x,}  and y {\\displaystyle y}  all lie within appropriate ranges so that the relevant expressions below are [well-defined](https://en.wikipedia.org/wiki/Well-defined "Well-defined"). Note that "for some k ∈ Z {\\displaystyle k\\in \\mathbb {Z} } " is just another way of saying "for some [integer](https://en.wikipedia.org/wiki/Integer "Integer") k . {\\displaystyle k.} "
The symbol ⟺ {\\displaystyle \\,\\iff \\,}  is [logical equality](https://en.wikipedia.org/wiki/Logical_equality "Logical equality") and indicates that if the left hand side is true then so is the right hand side and, conversely, if the right hand side is true then so is the left hand side (see this footnote[\[note 1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-13) for more details and an example illustrating this concept).
| Equation | [if and only if](https://en.wikipedia.org/wiki/If_and_only_if "If and only if") | Solution |
|---|---|---|
| sin θ \= y {\\displaystyle \\sin \\theta =y}  | | |
where the first four solutions can be written in expanded form as:
| Equation | [if and only if](https://en.wikipedia.org/wiki/If_and_only_if "If and only if") | Solution |
|---|---|---|
| sin θ \= y {\\displaystyle \\sin \\theta =y}  | | |
For example, if cos θ \= − 1 {\\displaystyle \\cos \\theta =-1}  then θ \= π \+ 2 π k \= − π \+ 2 π ( 1 \+ k ) {\\displaystyle \\theta =\\pi +2\\pi k=-\\pi +2\\pi (1+k)}  for some k ∈ Z . {\\displaystyle k\\in \\mathbb {Z} .}  While if sin θ \= ± 1 {\\displaystyle \\sin \\theta =\\pm 1}  then θ \= π 2 \+ π k \= − π 2 \+ π ( k \+ 1 ) {\\textstyle \\theta ={\\frac {\\pi }{2}}+\\pi k=-{\\frac {\\pi }{2}}+\\pi (k+1)}  for some k ∈ Z , {\\displaystyle k\\in \\mathbb {Z} ,}  where k {\\displaystyle k}  will be even if sin θ \= 1 {\\displaystyle \\sin \\theta =1}  and it will be odd if sin θ \= − 1\. {\\displaystyle \\sin \\theta =-1.}  The equations sec θ \= − 1 {\\displaystyle \\sec \\theta =-1}  and csc θ \= ± 1 {\\displaystyle \\csc \\theta =\\pm 1}  have the same solutions as cos θ \= − 1 {\\displaystyle \\cos \\theta =-1}  and sin θ \= ± 1 , {\\displaystyle \\sin \\theta =\\pm 1,}  respectively. In all equations above *except* for those just solved (i.e. except for sin {\\displaystyle \\sin } /csc θ \= ± 1 {\\displaystyle \\csc \\theta =\\pm 1}  and cos {\\displaystyle \\cos } /sec θ \= − 1 {\\displaystyle \\sec \\theta =-1} ), the integer k {\\displaystyle k}  in the solution's formula is uniquely determined by θ {\\displaystyle \\theta }  (for fixed r , s , x , {\\displaystyle r,s,x,}  and y {\\displaystyle y} ).
With the help of [integer parity](https://en.wikipedia.org/wiki/Parity_\(mathematics\) "Parity (mathematics)") Parity ( h ) \= { 0 if h is even 1 if h is odd {\\displaystyle \\operatorname {Parity} (h)={\\begin{cases}0&{\\text{if }}h{\\text{ is even }}\\\\1&{\\text{if }}h{\\text{ is odd }}\\\\\\end{cases}}}  it is possible to write a solution to cos θ \= x {\\displaystyle \\cos \\theta =x}  that doesn't involve the "plus or minus" ± {\\displaystyle \\,\\pm \\,}  symbol:
c
o
s
θ
\=
x
{\\displaystyle cos\\;\\theta =x\\quad }

if and only if
θ
\=
(
−
1
)
h
arccos
(
x
)
\+
π
h
\+
π
Parity
(
h
)
{\\displaystyle \\quad \\theta =(-1)^{h}\\arccos(x)+\\pi h+\\pi \\operatorname {Parity} (h)\\quad }

for some
h
∈
Z
.
{\\displaystyle h\\in \\mathbb {Z} .}

And similarly for the secant function,
s
e
c
θ
\=
r
{\\displaystyle sec\\;\\theta =r\\quad }

if and only if
θ
\=
(
−
1
)
h
arcsec
(
r
)
\+
π
h
\+
π
Parity
(
h
)
{\\displaystyle \\quad \\theta =(-1)^{h}\\operatorname {arcsec}(r)+\\pi h+\\pi \\operatorname {Parity} (h)\\quad }

for some
h
∈
Z
,
{\\displaystyle h\\in \\mathbb {Z} ,}

where π h \+ π Parity ( h ) {\\displaystyle \\pi h+\\pi \\operatorname {Parity} (h)}  equals π h {\\displaystyle \\pi h}  when the integer h {\\displaystyle h}  is even, and equals π h \+ π {\\displaystyle \\pi h+\\pi }  when it's odd.
#### Detailed example and explanation of the "plus or minus" symbol ±
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=6 "Edit section: Detailed example and explanation of the \"plus or minus\" symbol ±")\]
The solutions to cos θ \= x {\\displaystyle \\cos \\theta =x}  and sec θ \= x {\\displaystyle \\sec \\theta =x}  involve the "plus or minus" symbol ± , {\\displaystyle \\,\\pm ,\\,}  whose meaning is now clarified. Only the solution to cos θ \= x {\\displaystyle \\cos \\theta =x}  will be discussed since the discussion for sec θ \= x {\\displaystyle \\sec \\theta =x}  is the same. We are given x {\\displaystyle x}  between − 1 ≤ x ≤ 1 {\\displaystyle -1\\leq x\\leq 1}  and we know that there is an angle θ {\\displaystyle \\theta }  in some interval that satisfies cos θ \= x . {\\displaystyle \\cos \\theta =x.}  We want to find this θ . {\\displaystyle \\theta .}  The table above indicates that the solution is θ \= ± arccos x \+ 2 π k for some k ∈ Z {\\displaystyle \\,\\theta =\\pm \\arccos x+2\\pi k\\,\\quad {\\text{ for some }}k\\in \\mathbb {Z} }  which is a shorthand way of saying that (at least) one of the following statement is true:
1. θ
\=
arccos
x
\+
2
π
k
{\\displaystyle \\,\\theta =\\arccos x+2\\pi k\\,}

for some integer
k
,
{\\displaystyle k,}

or
2. θ
\=
−
arccos
x
\+
2
π
k
{\\displaystyle \\,\\theta =-\\arccos x+2\\pi k\\,}

for some integer
k
.
{\\displaystyle k.}

As mentioned above, if arccos x \= π {\\displaystyle \\,\\arccos x=\\pi \\,}  (which by definition only happens when x \= cos π \= − 1 {\\displaystyle x=\\cos \\pi =-1} ) then both statements (1) and (2) hold, although with different values for the integer k {\\displaystyle k} : if K {\\displaystyle K}  is the integer from statement (1), meaning that θ \= π \+ 2 π K {\\displaystyle \\theta =\\pi +2\\pi K}  holds, then the integer k {\\displaystyle k}  for statement (2) is K \+ 1 {\\displaystyle K+1}  (because θ \= − π \+ 2 π ( 1 \+ K ) {\\displaystyle \\theta =-\\pi +2\\pi (1+K)} ). However, if x ≠ − 1 {\\displaystyle x\\neq -1}  then the integer k {\\displaystyle k}  is unique and completely determined by θ . {\\displaystyle \\theta .}  If arccos x \= 0 {\\displaystyle \\,\\arccos x=0\\,}  (which by definition only happens when x \= cos 0 \= 1 {\\displaystyle x=\\cos 0=1} ) then ± arccos x \= 0 {\\displaystyle \\,\\pm \\arccos x=0\\,}  (because \+ arccos x \= \+ 0 \= 0 {\\displaystyle \\,+\\arccos x=+0=0\\,}  and − arccos x \= − 0 \= 0 {\\displaystyle \\,-\\arccos x=-0=0\\,}  so in both cases ± arccos x {\\displaystyle \\,\\pm \\arccos x\\,}  is equal to 0 {\\displaystyle 0} ) and so the statements (1) and (2) happen to be identical in this particular case (and so both hold). Having considered the cases arccos x \= 0 {\\displaystyle \\,\\arccos x=0\\,}  and arccos x \= π , {\\displaystyle \\,\\arccos x=\\pi ,\\,}  we now focus on the case where arccos x ≠ 0 {\\displaystyle \\,\\arccos x\\neq 0\\,}  and arccos x ≠ π , {\\displaystyle \\,\\arccos x\\neq \\pi ,\\,}  So assume this from now on. The solution to cos θ \= x {\\displaystyle \\cos \\theta =x}  is still θ \= ± arccos x \+ 2 π k for some k ∈ Z {\\displaystyle \\,\\theta =\\pm \\arccos x+2\\pi k\\,\\quad {\\text{ for some }}k\\in \\mathbb {Z} }  which as before is shorthand for saying that one of statements (1) and (2) is true. However this time, because arccos x ≠ 0 {\\displaystyle \\,\\arccos x\\neq 0\\,}  and 0 \< arccos x \< π , {\\displaystyle \\,0\<\\arccos x\<\\pi ,\\,}  statements (1) and (2) are different and furthermore, *exactly one* of the two equalities holds (not both). Additional information about θ {\\displaystyle \\theta }  is needed to determine which one holds. For example, suppose that x \= 0 {\\displaystyle x=0}  and that *all* that is known about θ {\\displaystyle \\theta }  is that − π ≤ θ ≤ π {\\displaystyle \\,-\\pi \\leq \\theta \\leq \\pi \\,}  (and nothing more is known). Then arccos x \= arccos 0 \= π 2 {\\displaystyle \\arccos x=\\arccos 0={\\frac {\\pi }{2}}}  and moreover, in this particular case k \= 0 {\\displaystyle k=0}  (for both the \+ {\\displaystyle \\,+\\,}  case and the − {\\displaystyle \\,-\\,}  case) and so consequently, θ \= ± arccos x \+ 2 π k \= ± ( π 2 ) \+ 2 π ( 0 ) \= ± π 2 . {\\displaystyle \\theta ~=~\\pm \\arccos x+2\\pi k~=~\\pm \\left({\\frac {\\pi }{2}}\\right)+2\\pi (0)~=~\\pm {\\frac {\\pi }{2}}.}  This means that θ {\\displaystyle \\theta }  could be either π / 2 {\\displaystyle \\,\\pi /2\\,}  or − π / 2\. {\\displaystyle \\,-\\pi /2.}  Without additional information it is not possible to determine which of these values θ {\\displaystyle \\theta }  has. An example of some additional information that could determine the value of θ {\\displaystyle \\theta }  would be knowing that the angle is above the x {\\displaystyle x} \-axis (in which case θ \= π / 2 {\\displaystyle \\theta =\\pi /2} ) or alternatively, knowing that it is below the x {\\displaystyle x} \-axis (in which case θ \= − π / 2 {\\displaystyle \\theta =-\\pi /2} ).
#### Equal identical trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=7 "Edit section: Equal identical trigonometric functions")\]
The table below shows how two angles θ {\\displaystyle \\theta }  and φ {\\displaystyle \\varphi }  must be related if their values under a given trigonometric function are equal or negatives of each other.
| Equation | [if and only if](https://en.wikipedia.org/wiki/If_and_only_if "If and only if") | Solution (for some k ∈ Z {\\displaystyle k\\in \\mathbb {Z} } ) |
|---|---|---|
The vertical double arrow [⇕ {\\displaystyle \\Updownarrow } ](https://en.wikipedia.org/wiki/Logical_equality "Logical equality") in the last row indicates that θ {\\displaystyle \\theta }  and φ {\\displaystyle \\varphi }  satisfy \| sin θ \| \= \| sin φ \| {\\displaystyle \\left\|\\sin \\theta \\right\|=\\left\|\\sin \\varphi \\right\|}  if and only if they satisfy \| cos θ \| \= \| cos φ \| . {\\displaystyle \\left\|\\cos \\theta \\right\|=\\left\|\\cos \\varphi \\right\|.} 
Set of all solutions to elementary trigonometric equations
Thus given a single solution θ {\\displaystyle \\theta }  to an elementary trigonometric equation (sin θ \= y {\\displaystyle \\sin \\theta =y}  is such an equation, for instance, and because sin ( arcsin y ) \= y {\\displaystyle \\sin(\\arcsin y)=y}  always holds, θ := arcsin y {\\displaystyle \\theta :=\\arcsin y}  is always a solution), the set of all solutions to it are:
| If θ {\\displaystyle \\theta }  solves |
|---|
### Transforming equations
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=8 "Edit section: Transforming equations")\]
The equations above can be transformed by using the reflection and shift identities:[\[13\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-14)
| Argument: \_ \= {\\displaystyle {\\underline {\\;\~~~~~~\\;}}=}  |
|---|
These formulas imply, in particular, that the following hold:
sin θ \= − sin ( − θ ) \= − sin ( π \+ θ ) \= − sin ( π − θ ) \= − cos ( π 2 \+ θ ) \= − cos ( π 2 − θ ) \= − cos ( − π 2 − θ ) \= − cos ( − π 2 \+ θ ) \= − cos ( 3 π 2 − θ ) \= − cos ( − 3 π 2 \+ θ ) cos θ \= − cos ( − θ ) \= − cos ( π \+ θ ) \= − cos ( π − θ ) \= − sin ( π 2 \+ θ ) \= − sin ( π 2 − θ ) \= − sin ( − π 2 − θ ) \= − sin ( − π 2 \+ θ ) \= − sin ( 3 π 2 − θ ) \= − sin ( − 3 π 2 \+ θ ) tan θ \= − tan ( − θ ) \= − tan ( π \+ θ ) \= − tan ( π − θ ) \= − cot ( π 2 \+ θ ) \= − cot ( π 2 − θ ) \= − cot ( − π 2 − θ ) \= − cot ( − π 2 \+ θ ) \= − cot ( 3 π 2 − θ ) \= − cot ( − 3 π 2 \+ θ ) {\\displaystyle {\\begin{aligned}\\sin \\theta &=-\\sin(-\\theta )&&=-\\sin(\\pi +\\theta )&&={\\phantom {-}}\\sin(\\pi -\\theta )\\\\&=-\\cos \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cos \\left({\\frac {\\pi }{2}}-\\theta \\right)&&=-\\cos \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&={\\phantom {-}}\\cos \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&=-\\cos \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&=-\\cos \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\cos \\theta &={\\phantom {-}}\\cos(-\\theta )&&=-\\cos(\\pi +\\theta )&&=-\\cos(\\pi -\\theta )\\\\&={\\phantom {-}}\\sin \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\sin \\left({\\frac {\\pi }{2}}-\\theta \\right)&&=-\\sin \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&=-\\sin \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&=-\\sin \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&={\\phantom {-}}\\sin \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\tan \\theta &=-\\tan(-\\theta )&&={\\phantom {-}}\\tan(\\pi +\\theta )&&=-\\tan(\\pi -\\theta )\\\\&=-\\cot \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cot \\left({\\frac {\\pi }{2}}-\\theta \\right)&&={\\phantom {-}}\\cot \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&=-\\cot \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cot \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&=-\\cot \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\end{aligned}}} ![{\\displaystyle {\\begin{aligned}\\sin \\theta &=-\\sin(-\\theta )&&=-\\sin(\\pi +\\theta )&&={\\phantom {-}}\\sin(\\pi -\\theta )\\\\&=-\\cos \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cos \\left({\\frac {\\pi }{2}}-\\theta \\right)&&=-\\cos \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&={\\phantom {-}}\\cos \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&=-\\cos \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&=-\\cos \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\cos \\theta &={\\phantom {-}}\\cos(-\\theta )&&=-\\cos(\\pi +\\theta )&&=-\\cos(\\pi -\\theta )\\\\&={\\phantom {-}}\\sin \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\sin \\left({\\frac {\\pi }{2}}-\\theta \\right)&&=-\\sin \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&=-\\sin \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&=-\\sin \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&={\\phantom {-}}\\sin \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\tan \\theta &=-\\tan(-\\theta )&&={\\phantom {-}}\\tan(\\pi +\\theta )&&=-\\tan(\\pi -\\theta )\\\\&=-\\cot \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cot \\left({\\frac {\\pi }{2}}-\\theta \\right)&&={\\phantom {-}}\\cot \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&=-\\cot \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cot \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&=-\\cot \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/316baee0254e64a99779ac4721054f23295aeec6)
where swapping sin ↔ csc , {\\displaystyle \\sin \\leftrightarrow \\csc ,}  swapping cos ↔ sec , {\\displaystyle \\cos \\leftrightarrow \\sec ,}  and swapping tan ↔ cot {\\displaystyle \\tan \\leftrightarrow \\cot }  gives the analogous equations for csc , sec , and cot , {\\displaystyle \\csc ,\\sec ,{\\text{ and }}\\cot ,}  respectively.
So for example, by using the equality sin ( π 2 − θ ) \= cos θ , {\\textstyle \\sin \\left({\\frac {\\pi }{2}}-\\theta \\right)=\\cos \\theta ,}  the equation cos θ \= x {\\displaystyle \\cos \\theta =x}  can be transformed into sin ( π 2 − θ ) \= x , {\\textstyle \\sin \\left({\\frac {\\pi }{2}}-\\theta \\right)=x,}  which allows for the solution to the equation sin φ \= x {\\displaystyle \\;\\sin \\varphi =x\\;}  (where φ := π 2 − θ {\\textstyle \\varphi :={\\frac {\\pi }{2}}-\\theta } ) to be used; that solution being: φ \= ( − 1 ) k arcsin ( x ) \+ π k for some k ∈ Z , {\\displaystyle \\varphi =(-1)^{k}\\arcsin(x)+\\pi k\\;{\\text{ for some }}k\\in \\mathbb {Z} ,}  which becomes: π 2 − θ \= ( − 1 ) k arcsin ( x ) \+ π k for some k ∈ Z {\\displaystyle {\\frac {\\pi }{2}}-\\theta ~=~(-1)^{k}\\arcsin(x)+\\pi k\\quad {\\text{ for some }}k\\in \\mathbb {Z} }  where using the fact that ( − 1 ) k \= ( − 1 ) − k {\\displaystyle (-1)^{k}=(-1)^{-k}}  and substituting h := − k {\\displaystyle h:=-k}  proves that another solution to cos θ \= x {\\displaystyle \\;\\cos \\theta =x\\;}  is: θ \= ( − 1 ) h \+ 1 arcsin ( x ) \+ π h \+ π 2 for some h ∈ Z . {\\displaystyle \\theta ~=~(-1)^{h+1}\\arcsin(x)+\\pi h+{\\frac {\\pi }{2}}\\quad {\\text{ for some }}h\\in \\mathbb {Z} .}  The substitution arcsin x \= π 2 − arccos x {\\displaystyle \\;\\arcsin x={\\frac {\\pi }{2}}-\\arccos x\\;}  may be used express the right hand side of the above formula in terms of arccos x {\\displaystyle \\;\\arccos x\\;}  instead of arcsin x . {\\displaystyle \\;\\arcsin x.\\;} 
### Relationships between trigonometric functions and inverse trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=9 "Edit section: Relationships between trigonometric functions and inverse trigonometric functions")\]
Trigonometric functions of inverse trigonometric functions are tabulated below. They may be derived from the Pythagorean identities. Another way is by considering the geometry of a right-angled triangle, with one side of length 1 and another side of length x , {\\displaystyle x,}  then applying the [Pythagorean theorem](https://en.wikipedia.org/wiki/Pythagorean_theorem "Pythagorean theorem") and definitions of the trigonometric ratios. It is worth noting that for arcsecant and arccosecant, the diagram assumes that x {\\displaystyle x}  is positive, and thus the result has to be corrected through the use of [absolute values](https://en.wikipedia.org/wiki/Absolute_value "Absolute value") and the [signum](https://en.wikipedia.org/wiki/Sign_function "Sign function") (sgn) operation.
| θ {\\displaystyle \\theta }  |
|---|
### Relationships among the inverse trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=10 "Edit section: Relationships among the inverse trigonometric functions")\]
[](https://en.wikipedia.org/wiki/File:Arcsine_Arccosine.svg)
The usual principal values of the arcsin(*x*) (red) and arccos(*x*) (blue) functions graphed on the cartesian plane.
[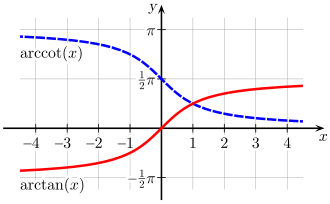](https://en.wikipedia.org/wiki/File:Arctangent_Arccotangent.svg)
The usual principal values of the arctan(*x*) and arccot(*x*) functions graphed on the cartesian plane.
[](https://en.wikipedia.org/wiki/File:Arcsecant_Arccosecant.svg)
Principal values of the arcsec(*x*) and arccsc(*x*) functions graphed on the cartesian plane.
Complementary angles:
arccos
(
x
)
\=
π
2
−
arcsin
(
x
)
arccot
(
x
)
\=
π
2
−
arctan
(
x
)
arccsc
(
x
)
\=
π
2
−
arcsec
(
x
)
{\\displaystyle {\\begin{aligned}\\arccos(x)&={\\frac {\\pi }{2}}-\\arcsin(x)\\\\\[0.5em\]\\operatorname {arccot}(x)&={\\frac {\\pi }{2}}-\\arctan(x)\\\\\[0.5em\]\\operatorname {arccsc}(x)&={\\frac {\\pi }{2}}-\\operatorname {arcsec}(x)\\end{aligned}}}
![{\\displaystyle {\\begin{aligned}\\arccos(x)&={\\frac {\\pi }{2}}-\\arcsin(x)\\\\\[0.5em\]\\operatorname {arccot} (x)&={\\frac {\\pi }{2}}-\\arctan(x)\\\\\[0.5em\]\\operatorname {arccsc} (x)&={\\frac {\\pi }{2}}-\\operatorname {arcsec} (x)\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec43798232f580abb074cf15f3d77692edd36af0)
Negative arguments:
arcsin
(
−
x
)
\=
−
arcsin
(
x
)
arccsc
(
−
x
)
\=
−
arccsc
(
x
)
arccos
(
−
x
)
\=
π
−
arccos
(
x
)
arcsec
(
−
x
)
\=
π
−
arcsec
(
x
)
arctan
(
−
x
)
\=
−
arctan
(
x
)
arccot
(
−
x
)
\=
π
−
arccot
(
x
)
{\\displaystyle {\\begin{aligned}\\arcsin(-x)&=-\\arcsin(x)\\\\\\operatorname {arccsc}(-x)&=-\\operatorname {arccsc}(x)\\\\\\arccos(-x)&=\\pi -\\arccos(x)\\\\\\operatorname {arcsec}(-x)&=\\pi -\\operatorname {arcsec}(x)\\\\\\arctan(-x)&=-\\arctan(x)\\\\\\operatorname {arccot}(-x)&=\\pi -\\operatorname {arccot}(x)\\end{aligned}}}

Reciprocal arguments:
arcsin
(
1
x
)
\=
arccsc
(
x
)
arccsc
(
1
x
)
\=
arcsin
(
x
)
arccos
(
1
x
)
\=
arcsec
(
x
)
arcsec
(
1
x
)
\=
arccos
(
x
)
arctan
(
1
x
)
\=
arccot
(
x
)
\=
π
2
−
arctan
(
x
)
,
if
x
\>
0
arctan
(
1
x
)
\=
arccot
(
x
)
−
π
\=
−
π
2
−
arctan
(
x
)
,
if
x
\<
0
arccot
(
1
x
)
\=
arctan
(
x
)
\=
π
2
−
arccot
(
x
)
,
if
x
\>
0
arccot
(
1
x
)
\=
arctan
(
x
)
\+
π
\=
3
π
2
−
arccot
(
x
)
,
if
x
\<
0
{\\displaystyle {\\begin{aligned}\\arcsin \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccsc}(x)&\\\\\[0.3em\]\\operatorname {arccsc} \\left({\\frac {1}{x}}\\right)&=\\arcsin(x)&\\\\\[0.3em\]\\arccos \\left({\\frac {1}{x}}\\right)&=\\operatorname {arcsec}(x)&\\\\\[0.3em\]\\operatorname {arcsec} \\left({\\frac {1}{x}}\\right)&=\\arccos(x)&\\\\\[0.3em\]\\arctan \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccot}(x)&={\\frac {\\pi }{2}}-\\arctan(x)\\,,{\\text{ if }}x\>0\\\\\[0.3em\]\\arctan \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccot}(x)-\\pi &=-{\\frac {\\pi }{2}}-\\arctan(x)\\,,{\\text{ if }}x\<0\\\\\[0.3em\]\\operatorname {arccot} \\left({\\frac {1}{x}}\\right)&=\\arctan(x)&={\\frac {\\pi }{2}}-\\operatorname {arccot}(x)\\,,{\\text{ if }}x\>0\\\\\[0.3em\]\\operatorname {arccot} \\left({\\frac {1}{x}}\\right)&=\\arctan(x)+\\pi &={\\frac {3\\pi }{2}}-\\operatorname {arccot}(x)\\,,{\\text{ if }}x\<0\\end{aligned}}}
![{\\displaystyle {\\begin{aligned}\\arcsin \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccsc} (x)&\\\\\[0.3em\]\\operatorname {arccsc} \\left({\\frac {1}{x}}\\right)&=\\arcsin(x)&\\\\\[0.3em\]\\arccos \\left({\\frac {1}{x}}\\right)&=\\operatorname {arcsec} (x)&\\\\\[0.3em\]\\operatorname {arcsec} \\left({\\frac {1}{x}}\\right)&=\\arccos(x)&\\\\\[0.3em\]\\arctan \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccot} (x)&={\\frac {\\pi }{2}}-\\arctan(x)\\,,{\\text{ if }}x\>0\\\\\[0.3em\]\\arctan \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccot} (x)-\\pi &=-{\\frac {\\pi }{2}}-\\arctan(x)\\,,{\\text{ if }}x\<0\\\\\[0.3em\]\\operatorname {arccot} \\left({\\frac {1}{x}}\\right)&=\\arctan(x)&={\\frac {\\pi }{2}}-\\operatorname {arccot} (x)\\,,{\\text{ if }}x\>0\\\\\[0.3em\]\\operatorname {arccot} \\left({\\frac {1}{x}}\\right)&=\\arctan(x)+\\pi &={\\frac {3\\pi }{2}}-\\operatorname {arccot} (x)\\,,{\\text{ if }}x\<0\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2fca7d530f42c84ed92b5895ccbafb013dc6645)
The identities above can be used with (and derived from) the fact that sin {\\displaystyle \\sin }  and csc {\\displaystyle \\csc }  are [reciprocals](https://en.wikipedia.org/wiki/Multiplicative_inverse "Multiplicative inverse") (i.e. csc \= 1 sin {\\displaystyle \\csc ={\\tfrac {1}{\\sin }}} ), as are cos {\\displaystyle \\cos }  and sec , {\\displaystyle \\sec ,}  and tan {\\displaystyle \\tan }  and cot . {\\displaystyle \\cot .} 
Useful identities if one only has a fragment of a sine table:
arcsin
(
x
)
\=
1
2
arccos
(
1
−
2
x
2
)
,
if
0
≤
x
≤
1
arcsin
(
x
)
\=
arctan
(
x
1
−
x
2
)
arccos
(
x
)
\=
1
2
arccos
(
2
x
2
−
1
)
,
if
0
≤
x
≤
1
arccos
(
x
)
\=
arctan
(
1
−
x
2
x
)
arccos
(
x
)
\=
arcsin
(
1
−
x
2
)
,
if
0
≤
x
≤
1
, from which you get
arccos
(
1
−
x
2
1
\+
x
2
)
\=
arcsin
(
2
x
1
\+
x
2
)
,
if
0
≤
x
≤
1
arcsin
(
1
−
x
2
)
\=
π
2
−
sgn
(
x
)
arcsin
(
x
)
arctan
(
x
)
\=
arcsin
(
x
1
\+
x
2
)
arccot
(
x
)
\=
arccos
(
x
1
\+
x
2
)
{\\displaystyle {\\begin{aligned}\\arcsin(x)&={\\frac {1}{2}}\\arccos \\left(1-2x^{2}\\right)\\,,{\\text{ if }}0\\leq x\\leq 1\\\\\\arcsin(x)&=\\arctan \\left({\\frac {x}{\\sqrt {1-x^{2}}}}\\right)\\\\\\arccos(x)&={\\frac {1}{2}}\\arccos \\left(2x^{2}-1\\right)\\,,{\\text{ if }}0\\leq x\\leq 1\\\\\\arccos(x)&=\\arctan \\left({\\frac {\\sqrt {1-x^{2}}}{x}}\\right)\\\\\\arccos(x)&=\\arcsin \\left({\\sqrt {1-x^{2}}}\\right)\\,,{\\text{ if }}0\\leq x\\leq 1{\\text{ , from which you get }}\\\\\\arccos &\\left({\\frac {1-x^{2}}{1+x^{2}}}\\right)=\\arcsin \\left({\\frac {2x}{1+x^{2}}}\\right)\\,,{\\text{ if }}0\\leq x\\leq 1\\\\\\arcsin &\\left({\\sqrt {1-x^{2}}}\\right)={\\frac {\\pi }{2}}-\\operatorname {sgn}(x)\\arcsin(x)\\\\\\arctan(x)&=\\arcsin \\left({\\frac {x}{\\sqrt {1+x^{2}}}}\\right)\\\\\\operatorname {arccot}(x)&=\\arccos \\left({\\frac {x}{\\sqrt {1+x^{2}}}}\\right)\\end{aligned}}}

Whenever the square root of a complex number is used here, we choose the root with the positive real part (or positive imaginary part if the square was negative real).
A useful form that follows directly from the table above is
arctan
(
x
)
\=
arccos
(
1
1
\+
x
2
)
,
if
x
≥
0
{\\displaystyle \\arctan(x)=\\arccos \\left({\\sqrt {\\frac {1}{1+x^{2}}}}\\right)\\,,{\\text{ if }}x\\geq 0}

.
It is obtained by recognizing that cos ( arctan ( x ) ) \= 1 1 \+ x 2 \= cos ( arccos ( 1 1 \+ x 2 ) ) {\\displaystyle \\cos \\left(\\arctan \\left(x\\right)\\right)={\\sqrt {\\frac {1}{1+x^{2}}}}=\\cos \\left(\\arccos \\left({\\sqrt {\\frac {1}{1+x^{2}}}}\\right)\\right)} .
From the [half-angle formula](https://en.wikipedia.org/wiki/Tangent_half-angle_formula "Tangent half-angle formula"), tan ( θ 2 ) \= sin ( θ ) 1 \+ cos ( θ ) {\\displaystyle \\tan \\left({\\tfrac {\\theta }{2}}\\right)={\\tfrac {\\sin(\\theta )}{1+\\cos(\\theta )}}} , we get:
arcsin
(
x
)
\=
2
arctan
(
x
1
\+
1
−
x
2
)
arccos
(
x
)
\=
2
arctan
(
1
−
x
2
1
\+
x
)
,
if
−
1
\<
x
≤
1
arctan
(
x
)
\=
2
arctan
(
x
1
\+
1
\+
x
2
)
{\\displaystyle {\\begin{aligned}\\arcsin(x)&=2\\arctan \\left({\\frac {x}{1+{\\sqrt {1-x^{2}}}}}\\right)\\\\\[0.5em\]\\arccos(x)&=2\\arctan \\left({\\frac {\\sqrt {1-x^{2}}}{1+x}}\\right)\\,,{\\text{ if }}-1\<x\\leq 1\\\\\[0.5em\]\\arctan(x)&=2\\arctan \\left({\\frac {x}{1+{\\sqrt {1+x^{2}}}}}\\right)\\end{aligned}}}
![{\\displaystyle {\\begin{aligned}\\arcsin(x)&=2\\arctan \\left({\\frac {x}{1+{\\sqrt {1-x^{2}}}}}\\right)\\\\\[0.5em\]\\arccos(x)&=2\\arctan \\left({\\frac {\\sqrt {1-x^{2}}}{1+x}}\\right)\\,,{\\text{ if }}-1\<x\\leq 1\\\\\[0.5em\]\\arctan(x)&=2\\arctan \\left({\\frac {x}{1+{\\sqrt {1+x^{2}}}}}\\right)\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7dd6a9370a877ca5e198e28b7582bd06b377bdc3)
### Arctangent addition formula
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=11 "Edit section: Arctangent addition formula")\]
arctan
(
u
)
±
arctan
(
v
)
\=
arctan
(
u
±
v
1
∓
u
v
)
(
mod
π
)
,
u
v
≠
1
.
{\\displaystyle \\arctan(u)\\pm \\arctan(v)=\\arctan \\left({\\frac {u\\pm v}{1\\mp uv}}\\right){\\pmod {\\pi }}\\,,\\quad uv\\neq 1\\,.}

This is derived from the tangent [addition formula](https://en.wikipedia.org/wiki/Angle_sum_and_difference_identities "Angle sum and difference identities")
tan
(
α
±
β
)
\=
tan
(
α
)
±
tan
(
β
)
1
∓
tan
(
α
)
tan
(
β
)
,
{\\displaystyle \\tan(\\alpha \\pm \\beta )={\\frac {\\tan(\\alpha )\\pm \\tan(\\beta )}{1\\mp \\tan(\\alpha )\\tan(\\beta )}}\\,,}

by letting
α
\=
arctan
(
u
)
,
β
\=
arctan
(
v
)
.
{\\displaystyle \\alpha =\\arctan(u)\\,,\\quad \\beta =\\arctan(v)\\,.}

## In calculus
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=12 "Edit section: In calculus")\]
### Derivatives of inverse trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=13 "Edit section: Derivatives of inverse trigonometric functions")\]
Main article: [Differentiation of trigonometric functions](https://en.wikipedia.org/wiki/Differentiation_of_trigonometric_functions "Differentiation of trigonometric functions")
The [derivatives](https://en.wikipedia.org/wiki/Derivative "Derivative") for complex values of *z* are as follows:
d
d
z
arcsin
(
z
)
\=
1
1
−
z
2
;
z
≠
−
1
,
\+
1
d
d
z
arccos
(
z
)
\=
−
1
1
−
z
2
;
z
≠
−
1
,
\+
1
d
d
z
arctan
(
z
)
\=
1
1
\+
z
2
;
z
≠
−
i
,
\+
i
d
d
z
arccot
(
z
)
\=
−
1
1
\+
z
2
;
z
≠
−
i
,
\+
i
d
d
z
arcsec
(
z
)
\=
1
z
2
1
−
1
z
2
;
z
≠
−
1
,
0
,
\+
1
d
d
z
arccsc
(
z
)
\=
−
1
z
2
1
−
1
z
2
;
z
≠
−
1
,
0
,
\+
1
{\\displaystyle {\\begin{aligned}{\\frac {d}{dz}}\\arcsin(z)&{}={\\frac {1}{\\sqrt {1-z^{2}}}}\\;;\&z&{}\\neq -1,+1\\\\{\\frac {d}{dz}}\\arccos(z)&{}=-{\\frac {1}{\\sqrt {1-z^{2}}}}\\;;\&z&{}\\neq -1,+1\\\\{\\frac {d}{dz}}\\arctan(z)&{}={\\frac {1}{1+z^{2}}}\\;;\&z&{}\\neq -i,+i\\\\{\\frac {d}{dz}}\\operatorname {arccot}(z)&{}=-{\\frac {1}{1+z^{2}}}\\;;\&z&{}\\neq -i,+i\\\\{\\frac {d}{dz}}\\operatorname {arcsec}(z)&{}={\\frac {1}{z^{2}{\\sqrt {1-{\\frac {1}{z^{2}}}}}}}\\;;\&z&{}\\neq -1,0,+1\\\\{\\frac {d}{dz}}\\operatorname {arccsc}(z)&{}=-{\\frac {1}{z^{2}{\\sqrt {1-{\\frac {1}{z^{2}}}}}}}\\;;\&z&{}\\neq -1,0,+1\\end{aligned}}}

Only for real values of *x*:
d
d
x
arcsec
(
x
)
\=
1
\|
x
\|
x
2
−
1
;
\|
x
\|
\>
1
d
d
x
arccsc
(
x
)
\=
−
1
\|
x
\|
x
2
−
1
;
\|
x
\|
\>
1
{\\displaystyle {\\begin{aligned}{\\frac {d}{dx}}\\operatorname {arcsec}(x)&{}={\\frac {1}{\|x\|{\\sqrt {x^{2}-1}}}}\\;;&\|x\|\>1\\\\{\\frac {d}{dx}}\\operatorname {arccsc}(x)&{}=-{\\frac {1}{\|x\|{\\sqrt {x^{2}-1}}}}\\;;&\|x\|\>1\\end{aligned}}}

These formulas can be derived in terms of the derivatives of trigonometric functions. For example, if x \= sin θ {\\displaystyle x=\\sin \\theta } , then d x / d θ \= cos θ \= 1 − x 2 , {\\textstyle dx/d\\theta =\\cos \\theta ={\\sqrt {1-x^{2}}},}  so
d
d
x
arcsin
(
x
)
\=
d
θ
d
x
\=
1
d
x
/
d
θ
\=
1
1
−
x
2
.
{\\displaystyle {\\frac {d}{dx}}\\arcsin(x)={\\frac {d\\theta }{dx}}={\\frac {1}{dx/d\\theta }}={\\frac {1}{\\sqrt {1-x^{2}}}}.}

### Expression as definite integrals
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=14 "Edit section: Expression as definite integrals")\]
Integrating the derivative and fixing the value at one point gives an expression for the inverse trigonometric function as a [definite integral](https://en.wikipedia.org/wiki/Definite_integral "Definite integral"):
arcsin
(
x
)
\=
∫
0
x
1
1
−
z
2
d
z
,
\|
x
\|
≤
1
arccos
(
x
)
\=
∫
x
1
1
1
−
z
2
d
z
,
\|
x
\|
≤
1
arctan
(
x
)
\=
∫
0
x
1
z
2
\+
1
d
z
,
arccot
(
x
)
\=
∫
x
∞
1
z
2
\+
1
d
z
,
arcsec
(
x
)
\=
∫
1
x
1
z
z
2
−
1
d
z
\=
π
\+
∫
−
x
−
1
1
z
z
2
−
1
d
z
,
x
≥
1
arccsc
(
x
)
\=
∫
x
∞
1
z
z
2
−
1
d
z
\=
∫
−
∞
−
x
1
z
z
2
−
1
d
z
,
x
≥
1
{\\displaystyle {\\begin{aligned}\\arcsin(x)&{}=\\int \_{0}^{x}{\\frac {1}{\\sqrt {1-z^{2}}}}\\,dz\\;,&\|x\|&{}\\leq 1\\\\\\arccos(x)&{}=\\int \_{x}^{1}{\\frac {1}{\\sqrt {1-z^{2}}}}\\,dz\\;,&\|x\|&{}\\leq 1\\\\\\arctan(x)&{}=\\int \_{0}^{x}{\\frac {1}{z^{2}+1}}\\,dz\\;,\\\\\\operatorname {arccot}(x)&{}=\\int \_{x}^{\\infty }{\\frac {1}{z^{2}+1}}\\,dz\\;,\\\\\\operatorname {arcsec}(x)&{}=\\int \_{1}^{x}{\\frac {1}{z{\\sqrt {z^{2}-1}}}}\\,dz=\\pi +\\int \_{-x}^{-1}{\\frac {1}{z{\\sqrt {z^{2}-1}}}}\\,dz\\;,\&x&{}\\geq 1\\\\\\operatorname {arccsc}(x)&{}=\\int \_{x}^{\\infty }{\\frac {1}{z{\\sqrt {z^{2}-1}}}}\\,dz=\\int \_{-\\infty }^{-x}{\\frac {1}{z{\\sqrt {z^{2}-1}}}}\\,dz\\;,\&x&{}\\geq 1\\\\\\end{aligned}}}

When *x* equals 1, the integrals with limited domains are [improper integrals](https://en.wikipedia.org/wiki/Improper_integral "Improper integral"), but still well-defined.
### Infinite series
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=15 "Edit section: Infinite series")\]
Similar to the sine and cosine functions, the inverse trigonometric functions can also be calculated using [power series](https://en.wikipedia.org/wiki/Power_series "Power series"), as follows. For arcsine, the series can be derived by expanding its derivative, 1 1 − z 2 {\\textstyle {\\tfrac {1}{\\sqrt {1-z^{2}}}}} , as a [binomial series](https://en.wikipedia.org/wiki/Binomial_series "Binomial series"), and integrating term by term (using the integral definition as above). The series for arctangent can similarly be derived by expanding its derivative 1 1 \+ z 2 {\\textstyle {\\frac {1}{1+z^{2}}}}  in a [geometric series](https://en.wikipedia.org/wiki/Geometric_series "Geometric series"), and applying the integral definition above (see [Leibniz series](https://en.wikipedia.org/wiki/Leibniz_series "Leibniz series")).
arcsin ( z ) \= z \+ ( 1 2 ) z 3 3 \+ ( 1 ⋅ 3 2 ⋅ 4 ) z 5 5 \+ ( 1 ⋅ 3 ⋅ 5 2 ⋅ 4 ⋅ 6 ) z 7 7 \+ ⋯ \= ∑ n \= 0 ∞ ( 2 n − 1 ) \! \! ( 2 n ) \! \! z 2 n \+ 1 2 n \+ 1 \= ∑ n \= 0 ∞ ( 2 n ) \! ( 2 n n \! ) 2 z 2 n \+ 1 2 n \+ 1 ; \| z \| ≤ 1 {\\displaystyle {\\begin{aligned}\\arcsin(z)&=z+\\left({\\frac {1}{2}}\\right){\\frac {z^{3}}{3}}+\\left({\\frac {1\\cdot 3}{2\\cdot 4}}\\right){\\frac {z^{5}}{5}}+\\left({\\frac {1\\cdot 3\\cdot 5}{2\\cdot 4\\cdot 6}}\\right){\\frac {z^{7}}{7}}+\\cdots \\\\\[5pt\]&=\\sum \_{n=0}^{\\infty }{\\frac {(2n-1)!!}{(2n)!!}}{\\frac {z^{2n+1}}{2n+1}}\\\\\[5pt\]&=\\sum \_{n=0}^{\\infty }{\\frac {(2n)!}{(2^{n}n!)^{2}}}{\\frac {z^{2n+1}}{2n+1}}\\,;\\qquad \|z\|\\leq 1\\end{aligned}}} ![{\\displaystyle {\\begin{aligned}\\arcsin(z)&=z+\\left({\\frac {1}{2}}\\right){\\frac {z^{3}}{3}}+\\left({\\frac {1\\cdot 3}{2\\cdot 4}}\\right){\\frac {z^{5}}{5}}+\\left({\\frac {1\\cdot 3\\cdot 5}{2\\cdot 4\\cdot 6}}\\right){\\frac {z^{7}}{7}}+\\cdots \\\\\[5pt\]&=\\sum \_{n=0}^{\\infty }{\\frac {(2n-1)!!}{(2n)!!}}{\\frac {z^{2n+1}}{2n+1}}\\\\\[5pt\]&=\\sum \_{n=0}^{\\infty }{\\frac {(2n)!}{(2^{n}n!)^{2}}}{\\frac {z^{2n+1}}{2n+1}}\\,;\\qquad \|z\|\\leq 1\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a0f778db7f760db059cf12f13ee5c2bf239fbb2f) The [Taylor series](https://en.wikipedia.org/wiki/Taylor_series "Taylor series") for arctangent is also known as the [arctangent series](https://en.wikipedia.org/wiki/Arctangent_series "Arctangent series") or Gregory's series. arctan ( z ) \= z − z 3 3 \+ z 5 5 − z 7 7 \+ ⋯ \= ∑ n \= 0 ∞ ( − 1 ) n z 2 n \+ 1 2 n \+ 1 ; \| z \| ≤ 1 z ≠ i , − i {\\displaystyle \\arctan(z)=z-{\\frac {z^{3}}{3}}+{\\frac {z^{5}}{5}}-{\\frac {z^{7}}{7}}+\\cdots =\\sum \_{n=0}^{\\infty }{\\frac {(-1)^{n}z^{2n+1}}{2n+1}}\\,;\\qquad \|z\|\\leq 1\\qquad z\\neq i,-i} 
Series for the other inverse trigonometric functions can be given in terms of these according to the relationships given above. For example, arccos ( x ) \= π / 2 − arcsin ( x ) {\\displaystyle \\arccos(x)=\\pi /2-\\arcsin(x)} , arccsc ( x ) \= arcsin ( 1 / x ) {\\displaystyle \\operatorname {arccsc}(x)=\\arcsin(1/x)} , and so on. Another series is given by:[\[14\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Borwein_2004-15)
2 ( arcsin ( x 2 ) ) 2 \= ∑ n \= 1 ∞ x 2 n n 2 ( 2 n n ) . {\\displaystyle 2\\left(\\arcsin \\left({\\frac {x}{2}}\\right)\\right)^{2}=\\sum \_{n=1}^{\\infty }{\\frac {x^{2n}}{n^{2}{\\binom {2n}{n}}}}.} 
[Leonhard Euler](https://en.wikipedia.org/wiki/Leonhard_Euler "Leonhard Euler") found a series for the arctangent that converges more quickly than its [Taylor series](https://en.wikipedia.org/wiki/Taylor_series "Taylor series"):
arctan ( z ) \= z 1 \+ z 2 ∑ n \= 0 ∞ ∏ k \= 1 n 2 k z 2 ( 2 k \+ 1 ) ( 1 \+ z 2 ) . {\\displaystyle \\arctan(z)={\\frac {z}{1+z^{2}}}\\sum \_{n=0}^{\\infty }\\prod \_{k=1}^{n}{\\frac {2kz^{2}}{(2k+1)(1+z^{2})}}.} [\[15\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-16) (The term in the sum for *n* = 0 is the [empty product](https://en.wikipedia.org/wiki/Empty_product "Empty product"), so is 1.)
Alternatively, this can be expressed as
arctan ( z ) \= ∑ n \= 0 ∞ 2 2 n ( n \! ) 2 ( 2 n \+ 1 ) \! z 2 n \+ 1 ( 1 \+ z 2 ) n \+ 1 . {\\displaystyle \\arctan(z)=\\sum \_{n=0}^{\\infty }{\\frac {2^{2n}(n!)^{2}}{(2n+1)!}}{\\frac {z^{2n+1}}{(1+z^{2})^{n+1}}}.} 
Another series for the arctangent function is given by
arctan ( z ) \= i ∑ n \= 1 ∞ 1 2 n − 1 ( 1 ( 1 \+ 2 i / z ) 2 n − 1 − 1 ( 1 − 2 i / z ) 2 n − 1 ) , {\\displaystyle \\arctan(z)=i\\sum \_{n=1}^{\\infty }{\\frac {1}{2n-1}}\\left({\\frac {1}{(1+2i/z)^{2n-1}}}-{\\frac {1}{(1-2i/z)^{2n-1}}}\\right),} 
where i \= − 1 {\\displaystyle i={\\sqrt {-1}}}  is the [imaginary unit](https://en.wikipedia.org/wiki/Imaginary_unit "Imaginary unit").[\[16\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-17)
#### Continued fractions for arctangent
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=16 "Edit section: Continued fractions for arctangent")\]
Two alternatives to the power series for arctangent are these [generalized continued fractions](https://en.wikipedia.org/wiki/Generalized_continued_fraction "Generalized continued fraction"):
arctan ( z ) \= z 1 \+ ( 1 z ) 2 3 − 1 z 2 \+ ( 3 z ) 2 5 − 3 z 2 \+ ( 5 z ) 2 7 − 5 z 2 \+ ( 7 z ) 2 9 − 7 z 2 \+ ⋱ \= z 1 \+ ( 1 z ) 2 3 \+ ( 2 z ) 2 5 \+ ( 3 z ) 2 7 \+ ( 4 z ) 2 9 \+ ⋱ {\\displaystyle \\arctan(z)={\\frac {z}{1+{\\cfrac {(1z)^{2}}{3-1z^{2}+{\\cfrac {(3z)^{2}}{5-3z^{2}+{\\cfrac {(5z)^{2}}{7-5z^{2}+{\\cfrac {(7z)^{2}}{9-7z^{2}+\\ddots }}}}}}}}}}={\\frac {z}{1+{\\cfrac {(1z)^{2}}{3+{\\cfrac {(2z)^{2}}{5+{\\cfrac {(3z)^{2}}{7+{\\cfrac {(4z)^{2}}{9+\\ddots }}}}}}}}}}} 
The second of these is valid in the cut complex plane. There are two cuts, from −**i** to the [point at infinity](https://en.wikipedia.org/wiki/Point_at_infinity "Point at infinity"), going down the imaginary axis, and from **i** to the point at infinity, going up the same axis. It works best for real numbers running from −1 to 1. The partial denominators are the odd natural numbers, and the partial numerators (after the first) are just (*nz*)2, with each perfect square appearing once. The first was developed by [Leonhard Euler](https://en.wikipedia.org/wiki/Leonhard_Euler "Leonhard Euler"), the second by [Carl Friedrich Gauss](https://en.wikipedia.org/wiki/Carl_Friedrich_Gauss "Carl Friedrich Gauss") utilizing the [Gaussian hypergeometric series](https://en.wikipedia.org/wiki/Gaussian_hypergeometric_series "Gaussian hypergeometric series").
### Indefinite integrals of inverse trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=17 "Edit section: Indefinite integrals of inverse trigonometric functions")\]
For real and complex values of *z*:
∫
arcsin
(
z
)
d
z
\=
z
arcsin
(
z
)
\+
1
−
z
2
\+
C
∫
arccos
(
z
)
d
z
\=
z
arccos
(
z
)
−
1
−
z
2
\+
C
∫
arctan
(
z
)
d
z
\=
z
arctan
(
z
)
−
1
2
ln
(
1
\+
z
2
)
\+
C
∫
arccot
(
z
)
d
z
\=
z
arccot
(
z
)
\+
1
2
ln
(
1
\+
z
2
)
\+
C
∫
arcsec
(
z
)
d
z
\=
z
arcsec
(
z
)
−
ln
\[
z
(
1
\+
z
2
−
1
z
2
)
\]
\+
C
∫
arccsc
(
z
)
d
z
\=
z
arccsc
(
z
)
\+
ln
\[
z
(
1
\+
z
2
−
1
z
2
)
\]
\+
C
{\\displaystyle {\\begin{aligned}\\int \\arcsin(z)\\,dz&{}=z\\,\\arcsin(z)+{\\sqrt {1-z^{2}}}+C\\\\\\int \\arccos(z)\\,dz&{}=z\\,\\arccos(z)-{\\sqrt {1-z^{2}}}+C\\\\\\int \\arctan(z)\\,dz&{}=z\\,\\arctan(z)-{\\frac {1}{2}}\\ln \\left(1+z^{2}\\right)+C\\\\\\int \\operatorname {arccot}(z)\\,dz&{}=z\\,\\operatorname {arccot}(z)+{\\frac {1}{2}}\\ln \\left(1+z^{2}\\right)+C\\\\\\int \\operatorname {arcsec}(z)\\,dz&{}=z\\,\\operatorname {arcsec}(z)-\\ln \\left\[z\\left(1+{\\sqrt {\\frac {z^{2}-1}{z^{2}}}}\\right)\\right\]+C\\\\\\int \\operatorname {arccsc}(z)\\,dz&{}=z\\,\\operatorname {arccsc}(z)+\\ln \\left\[z\\left(1+{\\sqrt {\\frac {z^{2}-1}{z^{2}}}}\\right)\\right\]+C\\end{aligned}}}
![{\\displaystyle {\\begin{aligned}\\int \\arcsin(z)\\,dz&{}=z\\,\\arcsin(z)+{\\sqrt {1-z^{2}}}+C\\\\\\int \\arccos(z)\\,dz&{}=z\\,\\arccos(z)-{\\sqrt {1-z^{2}}}+C\\\\\\int \\arctan(z)\\,dz&{}=z\\,\\arctan(z)-{\\frac {1}{2}}\\ln \\left(1+z^{2}\\right)+C\\\\\\int \\operatorname {arccot} (z)\\,dz&{}=z\\,\\operatorname {arccot} (z)+{\\frac {1}{2}}\\ln \\left(1+z^{2}\\right)+C\\\\\\int \\operatorname {arcsec} (z)\\,dz&{}=z\\,\\operatorname {arcsec} (z)-\\ln \\left\[z\\left(1+{\\sqrt {\\frac {z^{2}-1}{z^{2}}}}\\right)\\right\]+C\\\\\\int \\operatorname {arccsc} (z)\\,dz&{}=z\\,\\operatorname {arccsc} (z)+\\ln \\left\[z\\left(1+{\\sqrt {\\frac {z^{2}-1}{z^{2}}}}\\right)\\right\]+C\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3e2dde92bb82231c4326e45ce8b50e7298688bb)
For real *x* ≥ 1:
∫
arcsec
(
x
)
d
x
\=
x
arcsec
(
x
)
−
ln
(
x
\+
x
2
−
1
)
\+
C
∫
arccsc
(
x
)
d
x
\=
x
arccsc
(
x
)
\+
ln
(
x
\+
x
2
−
1
)
\+
C
{\\displaystyle {\\begin{aligned}\\int \\operatorname {arcsec}(x)\\,dx&{}=x\\,\\operatorname {arcsec}(x)-\\ln \\left(x+{\\sqrt {x^{2}-1}}\\right)+C\\\\\\int \\operatorname {arccsc}(x)\\,dx&{}=x\\,\\operatorname {arccsc}(x)+\\ln \\left(x+{\\sqrt {x^{2}-1}}\\right)+C\\end{aligned}}}

For all real *x* not between -1 and 1:
∫
arcsec
(
x
)
d
x
\=
x
arcsec
(
x
)
−
sgn
(
x
)
ln
\|
x
\+
x
2
−
1
\|
\+
C
∫
arccsc
(
x
)
d
x
\=
x
arccsc
(
x
)
\+
sgn
(
x
)
ln
\|
x
\+
x
2
−
1
\|
\+
C
{\\displaystyle {\\begin{aligned}\\int \\operatorname {arcsec}(x)\\,dx&{}=x\\,\\operatorname {arcsec}(x)-\\operatorname {sgn}(x)\\ln \\left\|x+{\\sqrt {x^{2}-1}}\\right\|+C\\\\\\int \\operatorname {arccsc}(x)\\,dx&{}=x\\,\\operatorname {arccsc}(x)+\\operatorname {sgn}(x)\\ln \\left\|x+{\\sqrt {x^{2}-1}}\\right\|+C\\end{aligned}}}

The absolute value is necessary to compensate for both negative and positive values of the arcsecant and arccosecant functions. The signum function is also necessary due to the absolute values in the [derivatives](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Derivatives) of the two functions, which create two different solutions for positive and negative values of x. These can be further simplified using the logarithmic definitions of the [inverse hyperbolic functions](https://en.wikipedia.org/wiki/Inverse_hyperbolic_functions#Logarithmic_representation "Inverse hyperbolic functions"):
∫
arcsec
(
x
)
d
x
\=
x
arcsec
(
x
)
−
arcosh
(
\|
x
\|
)
\+
C
∫
arccsc
(
x
)
d
x
\=
x
arccsc
(
x
)
\+
arcosh
(
\|
x
\|
)
\+
C
{\\displaystyle {\\begin{aligned}\\int \\operatorname {arcsec}(x)\\,dx&{}=x\\,\\operatorname {arcsec}(x)-\\operatorname {arcosh} (\|x\|)+C\\\\\\int \\operatorname {arccsc}(x)\\,dx&{}=x\\,\\operatorname {arccsc}(x)+\\operatorname {arcosh} (\|x\|)+C\\\\\\end{aligned}}}

The absolute value in the argument of the arcosh function creates a negative half of its graph, making it identical to the signum logarithmic function shown above.
All of these antiderivatives can be derived using [integration by parts](https://en.wikipedia.org/wiki/Integration_by_parts "Integration by parts") and the simple derivative forms shown above.
#### Example
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=18 "Edit section: Example")\]
Using ∫ u d v \= u v − ∫ v d u {\\displaystyle \\int u\\,dv=uv-\\int v\\,du}  (i.e. [integration by parts](https://en.wikipedia.org/wiki/Integration_by_parts "Integration by parts")), set
u
\=
arcsin
(
x
)
d
v
\=
d
x
d
u
\=
d
x
1
−
x
2
v
\=
x
{\\displaystyle {\\begin{aligned}u&=\\arcsin(x)\&dv&=dx\\\\du&={\\frac {dx}{\\sqrt {1-x^{2}}}}\&v&=x\\end{aligned}}}

Then
∫
arcsin
(
x
)
d
x
\=
x
arcsin
(
x
)
−
∫
x
1
−
x
2
d
x
,
{\\displaystyle \\int \\arcsin(x)\\,dx=x\\arcsin(x)-\\int {\\frac {x}{\\sqrt {1-x^{2}}}}\\,dx,}

which by the simple [substitution](https://en.wikipedia.org/wiki/Integration_by_substitution "Integration by substitution") w \= 1 − x 2 , d w \= − 2 x d x {\\displaystyle w=1-x^{2},\\ dw=-2x\\,dx}  yields the final result:
∫
arcsin
(
x
)
d
x
\=
x
arcsin
(
x
)
\+
1
−
x
2
\+
C
{\\displaystyle \\int \\arcsin(x)\\,dx=x\\arcsin(x)+{\\sqrt {1-x^{2}}}+C}

## Extension to the complex plane
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=19 "Edit section: Extension to the complex plane")\]
[](https://en.wikipedia.org/wiki/File:Riemann_surface_for_Arg_of_ArcTan_of_x.svg)
A [Riemann surface](https://en.wikipedia.org/wiki/Riemann_surface "Riemann surface") for the argument of the relation tan *z* = *x*. The orange sheet in the middle is the principal sheet representing arctan *x*. The blue sheet above and green sheet below are displaced by 2*π* and −2*π* respectively.
Since the inverse trigonometric functions are [analytic functions](https://en.wikipedia.org/wiki/Analytic_function "Analytic function"), they can be extended from the [real line](https://en.wikipedia.org/wiki/Number_line "Number line") to the complex plane. This results in functions with multiple sheets and [branch points](https://en.wikipedia.org/wiki/Branch_point "Branch point"). One possible way of defining the extension is:
arctan
(
z
)
\=
∫
0
z
d
x
1
\+
x
2
z
≠
−
i
,
\+
i
{\\displaystyle \\arctan(z)=\\int \_{0}^{z}{\\frac {dx}{1+x^{2}}}\\quad z\\neq -i,+i}

where the part of the imaginary axis which does not lie strictly between the branch points (−i and +i) is the [branch cut](https://en.wikipedia.org/wiki/Branch_cut "Branch cut") between the principal sheet and other sheets. The path of the integral must not cross a branch cut. For *z* not on a branch cut, a straight line path from 0 to *z* is such a path. For *z* on a branch cut, the path must approach from Re\[x\] \> 0 for the upper branch cut and from Re\[x\] \< 0 for the lower branch cut.
The arcsine function may then be defined as:
arcsin
(
z
)
\=
arctan
(
z
1
−
z
2
)
z
≠
−
1
,
\+
1
{\\displaystyle \\arcsin(z)=\\arctan \\left({\\frac {z}{\\sqrt {1-z^{2}}}}\\right)\\quad z\\neq -1,+1}

where (the square-root function has its cut along the negative real axis and) the part of the real axis which does not lie strictly between −1 and +1 is the branch cut between the principal sheet of arcsin and other sheets;
arccos
(
z
)
\=
π
2
−
arcsin
(
z
)
z
≠
−
1
,
\+
1
{\\displaystyle \\arccos(z)={\\frac {\\pi }{2}}-\\arcsin(z)\\quad z\\neq -1,+1}

which has the same cut as arcsin;
arccot
(
z
)
\=
π
2
−
arctan
(
z
)
z
≠
−
i
,
i
{\\displaystyle \\operatorname {arccot}(z)={\\frac {\\pi }{2}}-\\arctan(z)\\quad z\\neq -i,i}

which has the same cut as arctan;
arcsec
(
z
)
\=
arccos
(
1
z
)
z
≠
−
1
,
0
,
\+
1
{\\displaystyle \\operatorname {arcsec}(z)=\\arccos \\left({\\frac {1}{z}}\\right)\\quad z\\neq -1,0,+1}

where the part of the real axis between −1 and +1 inclusive is the cut between the principal sheet of arcsec and other sheets;
arccsc
(
z
)
\=
arcsin
(
1
z
)
z
≠
−
1
,
0
,
\+
1
{\\displaystyle \\operatorname {arccsc}(z)=\\arcsin \\left({\\frac {1}{z}}\\right)\\quad z\\neq -1,0,+1}

which has the same cut as arcsec.
### Logarithmic forms
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=20 "Edit section: Logarithmic forms")\]
These functions may also be expressed using [complex logarithms](https://en.wikipedia.org/wiki/Complex_logarithm "Complex logarithm"). This extends their [domains](https://en.wikipedia.org/wiki/Domain_of_a_function "Domain of a function") to the [complex plane](https://en.wikipedia.org/wiki/Complex_plane "Complex plane") in a natural fashion. The following identities for principal values of the functions hold everywhere that they are defined, even on their branch cuts.
arcsin
(
z
)
\=
−
i
ln
(
1
−
z
2
\+
i
z
)
\=
i
ln
(
1
−
z
2
−
i
z
)
\=
arccsc
(
1
z
)
arccos
(
z
)
\=
−
i
ln
(
z
\+
i
1
−
z
2
)
\=
i
ln
(
z
−
i
1
−
z
2
)
\=
π
2
−
arcsin
(
z
)
\=
arcsec
(
1
z
)
arctan
(
z
)
\=
−
i
2
ln
(
i
−
z
i
\+
z
)
\=
−
i
2
ln
(
1
\+
i
z
1
−
i
z
)
\=
arccot
(
1
z
)
arccot
(
z
)
\=
−
i
2
ln
(
z
\+
i
z
−
i
)
\=
−
i
2
ln
(
i
z
−
1
i
z
\+
1
)
\=
arctan
(
1
z
)
arcsec
(
z
)
\=
−
i
ln
(
1
z
\+
i
1
−
1
z
2
)
\=
i
ln
(
1
z
−
i
1
−
1
z
2
)
\=
π
2
−
arccsc
(
z
)
\=
arccos
(
1
z
)
arccsc
(
z
)
\=
−
i
ln
(
1
−
1
z
2
\+
i
z
)
\=
i
ln
(
1
−
1
z
2
−
i
z
)
\=
arcsin
(
1
z
)
{\\displaystyle {\\begin{aligned}\\arcsin(z)&{}=-i\\ln \\left({\\sqrt {1-z^{2}}}+iz\\right)=i\\ln \\left({\\sqrt {1-z^{2}}}-iz\\right)&{}=\\operatorname {arccsc} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\arccos(z)&{}=-i\\ln \\left(z+i{\\sqrt {1-z^{2}}}\\right)=i\\ln \\left(z-i{\\sqrt {1-z^{2}}}\\right)={\\frac {\\pi }{2}}-\\arcsin(z)&{}=\\operatorname {arcsec} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\arctan(z)&{}=-{\\frac {i}{2}}\\ln \\left({\\frac {i-z}{i+z}}\\right)=-{\\frac {i}{2}}\\ln \\left({\\frac {1+iz}{1-iz}}\\right)&{}=\\operatorname {arccot} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arccot}(z)&{}=-{\\frac {i}{2}}\\ln \\left({\\frac {z+i}{z-i}}\\right)=-{\\frac {i}{2}}\\ln \\left({\\frac {iz-1}{iz+1}}\\right)&{}=\\arctan \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arcsec}(z)&{}=-i\\ln \\left({\\frac {1}{z}}+i{\\sqrt {1-{\\frac {1}{z^{2}}}}}\\right)=i\\ln \\left({\\frac {1}{z}}-i{\\sqrt {1-{\\frac {1}{z^{2}}}}}\\right)={\\frac {\\pi }{2}}-\\operatorname {arccsc}(z)&{}=\\arccos \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arccsc}(z)&{}=-i\\ln \\left({\\sqrt {1-{\\frac {1}{z^{2}}}}}+{\\frac {i}{z}}\\right)=i\\ln \\left({\\sqrt {1-{\\frac {1}{z^{2}}}}}-{\\frac {i}{z}}\\right)&{}=\\arcsin \\left({\\frac {1}{z}}\\right)\\end{aligned}}}
![{\\displaystyle {\\begin{aligned}\\arcsin(z)&{}=-i\\ln \\left({\\sqrt {1-z^{2}}}+iz\\right)=i\\ln \\left({\\sqrt {1-z^{2}}}-iz\\right)&{}=\\operatorname {arccsc} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\arccos(z)&{}=-i\\ln \\left(z+i{\\sqrt {1-z^{2}}}\\right)=i\\ln \\left(z-i{\\sqrt {1-z^{2}}}\\right)={\\frac {\\pi }{2}}-\\arcsin(z)&{}=\\operatorname {arcsec} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\arctan(z)&{}=-{\\frac {i}{2}}\\ln \\left({\\frac {i-z}{i+z}}\\right)=-{\\frac {i}{2}}\\ln \\left({\\frac {1+iz}{1-iz}}\\right)&{}=\\operatorname {arccot} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arccot} (z)&{}=-{\\frac {i}{2}}\\ln \\left({\\frac {z+i}{z-i}}\\right)=-{\\frac {i}{2}}\\ln \\left({\\frac {iz-1}{iz+1}}\\right)&{}=\\arctan \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arcsec} (z)&{}=-i\\ln \\left({\\frac {1}{z}}+i{\\sqrt {1-{\\frac {1}{z^{2}}}}}\\right)=i\\ln \\left({\\frac {1}{z}}-i{\\sqrt {1-{\\frac {1}{z^{2}}}}}\\right)={\\frac {\\pi }{2}}-\\operatorname {arccsc} (z)&{}=\\arccos \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arccsc} (z)&{}=-i\\ln \\left({\\sqrt {1-{\\frac {1}{z^{2}}}}}+{\\frac {i}{z}}\\right)=i\\ln \\left({\\sqrt {1-{\\frac {1}{z^{2}}}}}-{\\frac {i}{z}}\\right)&{}=\\arcsin \\left({\\frac {1}{z}}\\right)\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/28cad9ecedf67c8ac8a996fb2cd3caf763eb2dcc)
#### Generalization
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=21 "Edit section: Generalization")\]
Because all of the inverse trigonometric functions output an angle of a right triangle, they can be generalized by using [Euler's formula](https://en.wikipedia.org/wiki/Euler%27s_formula "Euler's formula") to form a right triangle in the complex plane. Algebraically, this gives us:
c
e
i
θ
\=
c
cos
(
θ
)
\+
i
c
sin
(
θ
)
{\\displaystyle ce^{i\\theta }=c\\cos(\\theta )+ic\\sin(\\theta )}

or
c
e
i
θ
\=
a
\+
i
b
{\\displaystyle ce^{i\\theta }=a+ib}

where a {\\displaystyle a}  is the adjacent side, b {\\displaystyle b}  is the opposite side, and c {\\displaystyle c}  is the [hypotenuse](https://en.wikipedia.org/wiki/Hypotenuse "Hypotenuse"). From here, we can solve for θ {\\displaystyle \\theta } .
e
ln
(
c
)
\+
i
θ
\=
a
\+
i
b
ln
c
\+
i
θ
\=
ln
(
a
\+
i
b
)
θ
\=
Im
(
ln
(
a
\+
i
b
)
)
{\\displaystyle {\\begin{aligned}e^{\\ln(c)+i\\theta }&=a+ib\\\\\\ln c+i\\theta &=\\ln(a+ib)\\\\\\theta &=\\operatorname {Im} \\left(\\ln(a+ib)\\right)\\end{aligned}}}

or
θ
\=
−
i
ln
(
a
\+
i
b
c
)
{\\displaystyle \\theta =-i\\ln \\left({\\frac {a+ib}{c}}\\right)}

Simply taking the imaginary part works for any real-valued a {\\displaystyle a}  and b {\\displaystyle b} , but if a {\\displaystyle a}  or b {\\displaystyle b}  is complex-valued, we have to use the final equation so that the real part of the result isn't excluded. Since the length of the hypotenuse doesn't change the angle, ignoring the real part of ln ( a \+ b i ) {\\displaystyle \\ln(a+bi)}  also removes c {\\displaystyle c}  from the equation. In the final equation, we see that the angle of the triangle in the complex plane can be found by inputting the lengths of each side. By setting one of the three sides equal to 1 and one of the remaining sides equal to our input z {\\displaystyle z} , we obtain a formula for one of the inverse trig functions, for a total of six equations. Because the inverse trig functions require only one input, we must put the final side of the triangle in terms of the other two using the [Pythagorean theorem](https://en.wikipedia.org/wiki/Pythagorean_theorem "Pythagorean theorem") relation
a
2
\+
b
2
\=
c
2
{\\displaystyle a^{2}+b^{2}=c^{2}}

The table below shows the values of a, b, and c for each of the inverse trig functions and the equivalent expressions for θ {\\displaystyle \\theta }  that result from plugging the values into the equations θ \= − i ln ( a \+ i b c ) {\\displaystyle \\theta =-i\\ln \\left({\\tfrac {a+ib}{c}}\\right)}  above and simplifying.
a
b
c
−
i
ln
(
a
\+
i
b
c
)
θ
θ
a
,
b
∈
R
arcsin
(
z
)
1
−
z
2
z
1
−
i
ln
(
1
−
z
2
\+
i
z
1
)
\=
−
i
ln
(
1
−
z
2
\+
i
z
)
Im
(
ln
(
1
−
z
2
\+
i
z
)
)
arccos
(
z
)
z
1
−
z
2
1
−
i
ln
(
z
\+
i
1
−
z
2
1
)
\=
−
i
ln
(
z
\+
z
2
−
1
)
Im
(
ln
(
z
\+
z
2
−
1
)
)
arctan
(
z
)
1
z
1
\+
z
2
−
i
ln
(
1
\+
i
z
1
\+
z
2
)
\=
−
i
2
ln
(
i
−
z
i
\+
z
)
Im
(
ln
(
1
\+
i
z
)
)
arccot
(
z
)
z
1
z
2
\+
1
−
i
ln
(
z
\+
i
z
2
\+
1
)
\=
−
i
2
ln
(
z
\+
i
z
−
i
)
Im
(
ln
(
z
\+
i
)
)
arcsec
(
z
)
1
z
2
−
1
z
−
i
ln
(
1
\+
i
z
2
−
1
z
)
\=
−
i
ln
(
1
z
\+
1
z
2
−
1
)
Im
(
ln
(
1
z
\+
1
z
2
−
1
)
)
arccsc
(
z
)
z
2
−
1
1
z
−
i
ln
(
z
2
−
1
\+
i
z
)
\=
−
i
ln
(
1
−
1
z
2
\+
i
z
)
Im
(
ln
(
1
−
1
z
2
\+
i
z
)
)
{\\displaystyle {\\begin{aligned}\&a&\&b&\&c&&-i\\ln \\left({\\frac {a+ib}{c}}\\right)&&\\theta &&\\theta \_{a,b\\in \\mathbb {R} }\\\\\\arcsin(z)\\ \\ &{\\sqrt {1-z^{2}}}&\&z&&1&&-i\\ln \\left({\\frac {{\\sqrt {1-z^{2}}}+iz}{1}}\\right)&&=-i\\ln \\left({\\sqrt {1-z^{2}}}+iz\\right)&&\\operatorname {Im} \\left(\\ln \\left({\\sqrt {1-z^{2}}}+iz\\right)\\right)\\\\\\arccos(z)\\ \\ \&z&&{\\sqrt {1-z^{2}}}&&1&&-i\\ln \\left({\\frac {z+i{\\sqrt {1-z^{2}}}}{1}}\\right)&&=-i\\ln \\left(z+{\\sqrt {z^{2}-1}}\\right)&&\\operatorname {Im} \\left(\\ln \\left(z+{\\sqrt {z^{2}-1}}\\right)\\right)\\\\\\arctan(z)\\ \\ &1&\&z&&{\\sqrt {1+z^{2}}}&&-i\\ln \\left({\\frac {1+iz}{\\sqrt {1+z^{2}}}}\\right)&&=-{\\frac {i}{2}}\\ln \\left({\\frac {i-z}{i+z}}\\right)&&\\operatorname {Im} \\left(\\ln \\left(1+iz\\right)\\right)\\\\\\operatorname {arccot}(z)\\ \\ \&z&&1&&{\\sqrt {z^{2}+1}}&&-i\\ln \\left({\\frac {z+i}{\\sqrt {z^{2}+1}}}\\right)&&=-{\\frac {i}{2}}\\ln \\left({\\frac {z+i}{z-i}}\\right)&&\\operatorname {Im} \\left(\\ln \\left(z+i\\right)\\right)\\\\\\operatorname {arcsec}(z)\\ \\ &1&&{\\sqrt {z^{2}-1}}&\&z&&-i\\ln \\left({\\frac {1+i{\\sqrt {z^{2}-1}}}{z}}\\right)&&=-i\\ln \\left({\\frac {1}{z}}+{\\sqrt {{\\frac {1}{z^{2}}}-1}}\\right)&&\\operatorname {Im} \\left(\\ln \\left({\\frac {1}{z}}+{\\sqrt {{\\frac {1}{z^{2}}}-1}}\\right)\\right)\\\\\\operatorname {arccsc}(z)\\ \\ &{\\sqrt {z^{2}-1}}&&1&\&z&&-i\\ln \\left({\\frac {{\\sqrt {z^{2}-1}}+i}{z}}\\right)&&=-i\\ln \\left({\\sqrt {1-{\\frac {1}{z^{2}}}}}+{\\frac {i}{z}}\\right)&&\\operatorname {Im} \\left(\\ln \\left({\\sqrt {1-{\\frac {1}{z^{2}}}}}+{\\frac {i}{z}}\\right)\\right)\\\\\\end{aligned}}}

The particular form of the simplified expression can cause the output to differ from the [usual principal branch](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Principal_values) of each of the inverse trig functions. The formulations given will output the usual principal branch when using the Im ( ln z ) ∈ ( − π , π \] {\\displaystyle \\operatorname {Im} \\left(\\ln z\\right)\\in (-\\pi ,\\pi \]} ![{\\displaystyle \\operatorname {Im} \\left(\\ln z\\right)\\in (-\\pi ,\\pi \]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/781cef7f2317c18794eeaaddeef4073aadd51b75) and Re ( z ) ≥ 0 {\\displaystyle \\operatorname {Re} \\left({\\sqrt {z}}\\right)\\geq 0}  principal branch for every function except arccotangent in the θ {\\displaystyle \\theta }  column. Arccotangent in the θ {\\displaystyle \\theta }  column will output on its usual principal branch by using the Im ( ln z ) ∈ \[ 0 , 2 π ) {\\displaystyle \\operatorname {Im} \\left(\\ln z\\right)\\in \[0,2\\pi )}  and Im ( z ) ≥ 0 {\\displaystyle \\operatorname {Im} \\left({\\sqrt {z}}\\right)\\geq 0}  convention.
In this sense, all of the inverse trig functions can be thought of as specific cases of the complex-valued log function. Since these definition work for any complex-valued z {\\displaystyle z} , the definitions allow for [hyperbolic angles](https://en.wikipedia.org/wiki/Hyperbolic_angle "Hyperbolic angle") as outputs and can be used to further define the [inverse hyperbolic functions](https://en.wikipedia.org/wiki/Inverse_hyperbolic_functions "Inverse hyperbolic functions"). It's possible to algebraically prove these relations by starting with the exponential forms of the trigonometric functions and solving for the inverse function.
#### Example proof
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=22 "Edit section: Example proof")\]
sin
(
ϕ
)
\=
z
ϕ
\=
arcsin
(
z
)
{\\displaystyle {\\begin{aligned}\\sin(\\phi )&=z\\\\\\phi &=\\arcsin(z)\\end{aligned}}}

Using the [exponential definition of sine](https://en.wikipedia.org/wiki/Trigonometric_functions#Euler's_formula_and_the_exponential_function "Trigonometric functions"), and letting ξ \= e i ϕ , {\\displaystyle \\xi =e^{i\\phi },} 
z
\=
e
i
ϕ
−
e
−
i
ϕ
2
i
2
i
z
\=
ξ
−
1
ξ
0
\=
ξ
2
−
2
i
z
ξ
−
1
ξ
\=
i
z
±
1
−
z
2
ϕ
\=
−
i
ln
(
i
z
±
1
−
z
2
)
{\\displaystyle {\\begin{aligned}z&={\\frac {e^{i\\phi }-e^{-i\\phi }}{2i}}\\\\\[10mu\]2iz&=\\xi -{\\frac {1}{\\xi }}\\\\\[5mu\]0&=\\xi ^{2}-2iz\\xi -1\\\\\[5mu\]\\xi &=iz\\pm {\\sqrt {1-z^{2}}}\\\\\[5mu\]\\phi &=-i\\ln \\left(iz\\pm {\\sqrt {1-z^{2}}}\\right)\\end{aligned}}}
![{\\displaystyle {\\begin{aligned}z&={\\frac {e^{i\\phi }-e^{-i\\phi }}{2i}}\\\\\[10mu\]2iz&=\\xi -{\\frac {1}{\\xi }}\\\\\[5mu\]0&=\\xi ^{2}-2iz\\xi -1\\\\\[5mu\]\\xi &=iz\\pm {\\sqrt {1-z^{2}}}\\\\\[5mu\]\\phi &=-i\\ln \\left(iz\\pm {\\sqrt {1-z^{2}}}\\right)\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ed03e8cf773fa44cc78823d65f7d82f41276fb96)
(the positive branch is chosen)
ϕ
\=
arcsin
(
z
)
\=
−
i
ln
(
i
z
\+
1
−
z
2
)
{\\displaystyle \\phi =\\arcsin(z)=-i\\ln \\left(iz+{\\sqrt {1-z^{2}}}\\right)}

| | | |
|---|---|---|
| [](https://en.wikipedia.org/wiki/File:Complex_Arcsine.svg "Arcsine of z in the complex plane.") | [](https://en.wikipedia.org/wiki/File:Complex_Arccosine.svg "Arccosine of z in the complex plane.") | [](https://en.wikipedia.org/wiki/File:Complex_Arctangent.svg "Arctangent of z in the complex plane.") |
| arcsin ( z ) {\\displaystyle \\arcsin(z)}  | | |
| | | |
|---|---|---|
| [](https://en.wikipedia.org/wiki/File:Complex_Arccosecant.svg "Arccosecant of z in the complex plane.") | [](https://en.wikipedia.org/wiki/File:Complex_Arcsecant.svg "Arcsecant of z in the complex plane.") | [](https://en.wikipedia.org/wiki/File:Complex_Arccotangent.svg "Arccotangent of z in the complex plane.") |
| arccsc ( z ) {\\displaystyle \\operatorname {arccsc}(z)}  | | |
## Applications
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=23 "Edit section: Applications")\]
### Finding the angle of a right triangle
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=24 "Edit section: Finding the angle of a right triangle")\]
[](https://en.wikipedia.org/wiki/File:Trigonometry_triangle.svg)
A [right triangle](https://en.wikipedia.org/wiki/Right_triangle "Right triangle") with sides relative to an angle at the
A
{\\displaystyle A}

point.
Inverse trigonometric functions are useful when trying to determine the remaining two angles of a [right triangle](https://en.wikipedia.org/wiki/Right_triangle "Right triangle") when the lengths of the sides of the triangle are known. Recalling the right-triangle definitions of sine and cosine, it follows that
θ
\=
arcsin
(
opposite
hypotenuse
)
\=
arccos
(
adjacent
hypotenuse
)
.
{\\displaystyle \\theta =\\arcsin \\left({\\frac {\\text{opposite}}{\\text{hypotenuse}}}\\right)=\\arccos \\left({\\frac {\\text{adjacent}}{\\text{hypotenuse}}}\\right).}

Often, the hypotenuse is unknown and would need to be calculated before using arcsine or arccosine using the [Pythagorean theorem](https://en.wikipedia.org/wiki/Pythagorean_theorem "Pythagorean theorem"): a 2 \+ b 2 \= h 2 {\\displaystyle a^{2}+b^{2}=h^{2}}  where h {\\displaystyle h}  is the length of the hypotenuse. Arctangent comes in handy in this situation, as the length of the hypotenuse is not needed.
θ
\=
arctan
(
opposite
adjacent
)
.
{\\displaystyle \\theta =\\arctan \\left({\\frac {\\text{opposite}}{\\text{adjacent}}}\\right)\\,.}

For example, suppose a roof drops 8 feet as it runs out 20 feet. The roof makes an angle *θ* with the horizontal, where *θ* may be computed as follows:
θ
\=
arctan
(
opposite
adjacent
)
\=
arctan
(
rise
run
)
\=
arctan
(
8
20
)
≈
21\.8
∘
.
{\\displaystyle \\theta =\\arctan \\left({\\frac {\\text{opposite}}{\\text{adjacent}}}\\right)=\\arctan \\left({\\frac {\\text{rise}}{\\text{run}}}\\right)=\\arctan \\left({\\frac {8}{20}}\\right)\\approx 21.8^{\\circ }\\,.}

### In computer science and engineering
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=25 "Edit section: In computer science and engineering")\]
#### Two-argument variant of arctangent
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=26 "Edit section: Two-argument variant of arctangent")\]
Main article: [atan2](https://en.wikipedia.org/wiki/Atan2 "Atan2")
The two-argument [atan2](https://en.wikipedia.org/wiki/Atan2 "Atan2") function computes the arctangent of *y*/*x* given y and x, but with a range of (−π, π\]. In other words, atan2(*y*, *x*) is the angle between the positive x\-axis of a plane and the point (*x*, *y*) on it, with positive sign for counter-clockwise angles ([upper half-plane](https://en.wikipedia.org/wiki/Upper_half-plane "Upper half-plane"), *y* \> 0), and negative sign for clockwise angles (lower half-plane, *y* \< 0). It was first introduced in many computer programming languages, but it is now also common in other fields of science and engineering.
In terms of the standard **arctan** function, that is with range of (−π/2, π/2), it can be expressed as follows:
atan2 ( y , x ) \= { arctan ( y x ) x \> 0 arctan ( y x ) \+ π y ≥ 0 , x \< 0 arctan ( y x ) − π y \< 0 , x \< 0 π 2 y \> 0 , x \= 0 − π 2 y \< 0 , x \= 0 undefined y \= 0 , x \= 0 {\\displaystyle \\operatorname {atan2} (y,x)={\\begin{cases}\\arctan \\left({\\frac {y}{x}}\\right)&\\quad x\>0\\\\\\arctan \\left({\\frac {y}{x}}\\right)+\\pi &\\quad y\\geq 0,\\;x\<0\\\\\\arctan \\left({\\frac {y}{x}}\\right)-\\pi &\\quad y\<0,\\;x\<0\\\\{\\frac {\\pi }{2}}&\\quad y\>0,\\;x=0\\\\-{\\frac {\\pi }{2}}&\\quad y\<0,\\;x=0\\\\{\\text{undefined}}&\\quad y=0,\\;x=0\\end{cases}}} 
It also equals the [principal value](https://en.wikipedia.org/wiki/Principal_value "Principal value") of the [argument](https://en.wikipedia.org/wiki/Arg_\(mathematics\) "Arg (mathematics)") of the [complex number](https://en.wikipedia.org/wiki/Complex_number "Complex number") *x* + *iy*.
This limited version of the function above may also be defined using the [tangent half-angle formulae](https://en.wikipedia.org/wiki/Tangent_half-angle_formula "Tangent half-angle formula") as follows: atan2 ( y , x ) \= 2 arctan ( y x 2 \+ y 2 \+ x ) {\\displaystyle \\operatorname {atan2} (y,x)=2\\arctan \\left({\\frac {y}{{\\sqrt {x^{2}+y^{2}}}+x}}\\right)}  provided that either *x* \> 0 or *y* ≠ 0. However this fails if given *x* ≤ 0 and *y* = 0 so the expression is unsuitable for computational use.
The above argument order (y, x) seems to be the most common, and in particular is used in [ISO standards](https://en.wikipedia.org/wiki/ISO_standard "ISO standard") such as the [C programming language](https://en.wikipedia.org/wiki/C_\(programming_language\) "C (programming language)"), but a few authors may use the opposite convention (x, y) so some caution is warranted. (See variations at [atan2 § Realizations of the function in common computer languages](https://en.wikipedia.org/wiki/Atan2#Realizations_of_the_function_in_common_computer_languages "Atan2").)
#### Arctangent function with location parameter
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=27 "Edit section: Arctangent function with location parameter")\]
In many applications[\[17\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-18) the solution y {\\displaystyle y}  of the equation x \= tan ( y ) {\\displaystyle x=\\tan(y)}  is to come as close as possible to a given value − ∞ \< η \< ∞ {\\displaystyle -\\infty \<\\eta \<\\infty } . The adequate solution is produced by the parameter modified arctangent function
y
\=
arctan
η
(
x
)
:=
arctan
(
x
)
\+
π
rni
(
η
−
arctan
(
x
)
π
)
.
{\\displaystyle y=\\arctan \_{\\eta }(x):=\\arctan(x)+\\pi \\,\\operatorname {rni} \\left({\\frac {\\eta -\\arctan(x)}{\\pi }}\\right)\\,.}

The function rni {\\displaystyle \\operatorname {rni} }  rounds to the nearest integer.
#### Numerical accuracy
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=28 "Edit section: Numerical accuracy")\]
For angles near 0 and π, arccosine is [ill-conditioned](https://en.wikipedia.org/wiki/Ill-conditioned "Ill-conditioned"), and similarly with arcsine for angles near −π/2 and π/2. Computer applications thus need to consider the stability of inputs to these functions and the sensitivity of their calculations, or use alternate methods.[\[18\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Gade_2010-19)
## See also
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=29 "Edit section: See also")\]
- [Arcsine distribution](https://en.wikipedia.org/wiki/Arcsine_distribution "Arcsine distribution")
- [Inverse exsecant](https://en.wikipedia.org/wiki/Inverse_exsecant "Inverse exsecant")
- [Inverse versine](https://en.wikipedia.org/wiki/Inverse_versine "Inverse versine")
- [Inverse hyperbolic functions](https://en.wikipedia.org/wiki/Inverse_hyperbolic_functions "Inverse hyperbolic functions")
- [List of integrals of inverse trigonometric functions](https://en.wikipedia.org/wiki/List_of_integrals_of_inverse_trigonometric_functions "List of integrals of inverse trigonometric functions")
- [List of trigonometric identities](https://en.wikipedia.org/wiki/List_of_trigonometric_identities "List of trigonometric identities")
- [Trigonometric function](https://en.wikipedia.org/wiki/Trigonometric_function "Trigonometric function")
- [Trigonometric functions of matrices](https://en.wikipedia.org/wiki/Trigonometric_functions_of_matrices "Trigonometric functions of matrices")
## Notes
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=30 "Edit section: Notes")\]
1. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-13)**
The expression "LHS
⟺
{\\displaystyle \\,\\iff \\,}

RHS" indicates that *either* (a) the left hand side (i.e. LHS) and right hand side (i.e. RHS) are *both* true, or else (b) the left hand side and right hand side are *both* false; there is *no* option (c) (e.g. it is *not* possible for the LHS statement to be true and also simultaneously for the RHS statement to be false), because otherwise "LHS
⟺
{\\displaystyle \\,\\iff \\,}

RHS" would not have been written.
To clarify, suppose that it is written "LHS
⟺
{\\displaystyle \\,\\iff \\,}

RHS" where LHS (which abbreviates *left hand side*) and RHS are both statements that can individually be either be true or false. For example, if
θ
{\\displaystyle \\theta }

and
s
{\\displaystyle s}

are some given and fixed numbers and if the following is written:
tan
θ
\=
s
⟺
θ
\=
arctan
(
s
)
\+
π
k
for some
k
∈
Z
{\\displaystyle \\tan \\theta =s\\,\\iff \\,\\theta =\\arctan(s)+\\pi k\\quad {\\text{ for some }}k\\in \\mathbb {Z} }

then LHS is the statement "
tan
θ
\=
s
{\\displaystyle \\tan \\theta =s}

". Depending on what specific values
θ
{\\displaystyle \\theta }

and
s
{\\displaystyle s}

have, this LHS statement can either be true or false. For instance, LHS is true if
θ
\=
0
{\\displaystyle \\theta =0}

and
s
\=
0
{\\displaystyle s=0}

(because in this case
tan
θ
\=
tan
0
\=
s
{\\displaystyle \\tan \\theta =\\tan 0=s}

) but LHS is false if
θ
\=
0
{\\displaystyle \\theta =0}

and
s
\=
2
{\\displaystyle s=2}

(because in this case
tan
θ
\=
tan
0
\=
s
{\\displaystyle \\tan \\theta =\\tan 0=s}

which is not equal to
s
\=
2
{\\displaystyle s=2}

); more generally, LHS is false if
θ
\=
0
{\\displaystyle \\theta =0}

and
s
≠
0\.
{\\displaystyle s\\neq 0.}

Similarly, RHS is the statement "
θ
\=
arctan
(
s
)
\+
π
k
{\\displaystyle \\theta =\\arctan(s)+\\pi k}

for some
k
∈
Z
{\\displaystyle k\\in \\mathbb {Z} }

". The RHS statement can also either true or false (as before, whether the RHS statement is true or false depends on what specific values
θ
{\\displaystyle \\theta }

and
s
{\\displaystyle s}

have). The logical equality symbol
⟺
{\\displaystyle \\,\\iff \\,}

means that (a) if the LHS statement is true then the RHS statement is also *necessarily* true, and moreover (b) if the LHS statement is false then the RHS statement is also *necessarily* false. Similarly,
⟺
{\\displaystyle \\,\\iff \\,}

*also* means that (c) if the RHS statement is true then the LHS statement is also *necessarily* true, and moreover (d) if the RHS statement is false then the LHS statement is also *necessarily* false.
## References
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=31 "Edit section: References")\]
- [Abramowitz, Milton](https://en.wikipedia.org/wiki/Milton_Abramowitz "Milton Abramowitz"); [Stegun, Irene A.](https://en.wikipedia.org/wiki/Irene_Stegun "Irene Stegun"), eds. (1972). [*Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables*](https://archive.org/details/handbookofmathe000abra). New York: [Dover Publications](https://en.wikipedia.org/wiki/Dover_Publications "Dover Publications"). [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-0-486-61272-0](https://en.wikipedia.org/wiki/Special:BookSources/978-0-486-61272-0 "Special:BookSources/978-0-486-61272-0")
.
1. ^ [***a***](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Hall_1909_1-0) [***b***](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Hall_1909_1-1) [***c***](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Hall_1909_1-2) [***d***](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Hall_1909_1-3)
Hall, Arthur Graham; Frink, Fred Goodrich (Jan 1909). ["Chapter II. The Acute Angle \[14\] Inverse trigonometric functions"](https://archive.org/stream/planetrigonometr00hallrich#page/n30/mode/1up). Written at Ann Arbor, Michigan, USA. *Trigonometry*. Vol. Part I: Plane Trigonometry. New York, USA: [Henry Holt and Company](https://en.wikipedia.org/wiki/Henry_Holt_and_Company "Henry Holt and Company") / Norwood Press / J. S. Cushing Co. - Berwick & Smith Co., Norwood, Massachusetts, USA. p. 15. Retrieved 2017-08-12. "\[…\] `α = arcsin m`: It is frequently read "[arc-sine](https://en.wikipedia.org/wiki/Arc-sine "Arc-sine") *m*" or "[anti-sine](https://en.wikipedia.org/wiki/Anti-sine "Anti-sine") *m*," since two mutually inverse functions are said each to be the [anti-function](https://en.wikipedia.org/wiki/Anti-function "Anti-function") of the other. \[…\] A similar symbolic relation holds for the other [trigonometric functions](https://en.wikipedia.org/wiki/Trigonometric_function "Trigonometric function"). \[…\] This notation is universally used in Europe and is fast gaining ground in this country. A less desirable symbol, `α = sin-1m`, is still found in English and American texts. The notation `α = inv sin m` is perhaps better still on account of its general applicability. \[…\]"
2. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-cyclometric_2-0)**
[Klein, Felix](https://en.wikipedia.org/wiki/Felix_Klein "Felix Klein") (1924) \[1902\]. *Elementarmathematik vom höheren Standpunkt aus: Arithmetik, Algebra, Analysis* (in German). Vol. 1 (3rd ed.). Berlin: J. Springer.
Translated as
[*Elementary Mathematics from an Advanced Standpoint: Arithmetic, Algebra, Analysis*](https://books.google.com/books?id=8KuoxgykfbkC). Translated by Hedrick, E. R.; Noble, C. A. Macmillan. 1932. [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-0-486-43480-3](https://en.wikipedia.org/wiki/Special:BookSources/978-0-486-43480-3 "Special:BookSources/978-0-486-43480-3")
.
`{{cite book}}`: ISBN / Date incompatibility ([help](https://en.wikipedia.org/wiki/Help:CS1_errors#invalid_isbn_date "Help:CS1 errors"))
3. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-arcus_3-0)**
[Hazewinkel, Michiel](https://en.wikipedia.org/wiki/Michiel_Hazewinkel "Michiel Hazewinkel") (1994) \[1987\]. [*Encyclopaedia of Mathematics*](https://en.wikipedia.org/wiki/Encyclopedia_of_Mathematics "Encyclopedia of Mathematics") (unabridged reprint ed.). [Kluwer Academic Publishers](https://en.wikipedia.org/wiki/Kluwer_Academic_Publishers "Kluwer Academic Publishers") / [Springer Science & Business Media](https://en.wikipedia.org/wiki/Springer_Science_%26_Business_Media "Springer Science & Business Media"). [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-155608010-4](https://en.wikipedia.org/wiki/Special:BookSources/978-155608010-4 "Special:BookSources/978-155608010-4")
.
Bronshtein, I. N.; Semendyayev, K. A.; Musiol, Gerhard; Mühlig, Heiner. "Cyclometric or Inverse Trigonometric Functions". *Handbook of Mathematics* (6th ed.). Berlin: Springer. § 2.8, pp. 85–89. [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1007/978-3-663-46221-8](https://doi.org/10.1007%2F978-3-663-46221-8) (inactive 1 Jul 2025).
`{{cite book}}`: CS1 maint: DOI inactive as of July 2025 ([link](https://en.wikipedia.org/wiki/Category:CS1_maint:_DOI_inactive_as_of_July_2025 "Category:CS1 maint: DOI inactive as of July 2025"))
However, the term "arcus function" can also refer to the function giving the [argument](https://en.wikipedia.org/wiki/Argument_\(complex_analysis\) "Argument (complex analysis)") of a complex number, sometimes called the *arcus*.
4. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-4)**
Weisstein, Eric W. ["Inverse Trigonometric Functions"](https://mathworld.wolfram.com/InverseTrigonometricFunctions.html). *mathworld.wolfram.com*. Retrieved 2020-08-29.
5. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Americana_1912_5-0)**
Beach, Frederick Converse; Rines, George Edwin, eds. (1912). "Inverse trigonometric functions". [*The Americana: a universal reference library*](https://en.wikipedia.org/wiki/The_Americana "The Americana"). Vol. 21.
6. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-6)**
Cook, John D. (11 Feb 2021). ["Trig functions across programming languages"](https://www.johndcook.com/blog/2021/02/11/trig-across-languages). *johndcook.com* (blog). Retrieved 2021-03-10.
7. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Cajori_7-0)**
[Cajori, Florian](https://en.wikipedia.org/wiki/Florian_Cajori "Florian Cajori") (1919). [*A History of Mathematics*](https://archive.org/details/ahistorymathema02cajogoog) (2 ed.). New York, NY: [The Macmillan Company](https://en.wikipedia.org/wiki/The_Macmillan_Company "The Macmillan Company"). p. [272](https://archive.org/details/ahistorymathema02cajogoog/page/n284).
8. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Herschel_1813_8-0)**
[Herschel, John Frederick William](https://en.wikipedia.org/wiki/John_Frederick_William_Herschel "John Frederick William Herschel") (1813). ["On a remarkable Application of Cotes's Theorem"](https://books.google.com/books?id=qpRJAAAAYAAJ&pg=PA8). *Philosophical Transactions*. **103** (1). Royal Society, London: 8. [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1098/rstl.1813.0005](https://doi.org/10.1098%2Frstl.1813.0005).
9. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-9)**
["Inverse trigonometric functions"](https://brilliant.org/wiki/inverse-trigonometric-functions/). Wiki. *Brilliant Math & Science (brilliant.org)*. Retrieved 2020-08-29.
10. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Korn_2000_10-0)**
Korn, Grandino Arthur; [Korn, Theresa M.](https://en.wikipedia.org/wiki/Theresa_M._Korn "Theresa M. Korn") (2000) \[1961\]. "21.2.-4. Inverse Trigonometric Functions". [*Mathematical handbook for scientists and engineers: Definitions, theorems, and formulars for reference and review*](https://archive.org/details/mathematicalhand00korn_849) (3 ed.). Mineola, New York, USA: [Dover Publications, Inc.](https://en.wikipedia.org/wiki/Dover_Publications,_Inc. "Dover Publications, Inc.") p. [811](https://archive.org/details/mathematicalhand00korn_849/page/n828). [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-0-486-41147-7](https://en.wikipedia.org/wiki/Special:BookSources/978-0-486-41147-7 "Special:BookSources/978-0-486-41147-7")
.
11. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Bhatti_1999_11-0)**
Bhatti, Sanaullah; Nawab-ud-Din; Ahmed, Bashir; Yousuf, S. M.; Taheem, Allah Bukhsh (1999). "Differentiation of Trigonometric, Logarithmic and Exponential Functions". In Ellahi, Mohammad Maqbool; Dar, Karamat Hussain; Hussain, Faheem (eds.). *Calculus and Analytic Geometry* (1 ed.). [Lahore](https://en.wikipedia.org/wiki/Lahore "Lahore"): Punjab Textbook Board. p. 140.
12. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-12)**
For example:
Stewart, James; Clegg, Daniel; Watson, Saleem (2021). "Inverse Functions and Logarithms". *Calculus: Early Transcendentals* (9th ed.). Cengage Learning. § 1.5, p. 64. [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-1-337-61392-7](https://en.wikipedia.org/wiki/Special:BookSources/978-1-337-61392-7 "Special:BookSources/978-1-337-61392-7")
.
13. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-14)** [Abramowitz & Stegun 1972](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#CITEREFAbramowitzStegun1972), p. 73, 4.3.44
14. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Borwein_2004_15-0)**
Borwein, Jonathan; Bailey, David; Gingersohn, Roland (2004). [*Experimentation in Mathematics: Computational Paths to Discovery*](https://archive.org/details/experimentationm00borw_656) (1 ed.). Wellesley, MA, USA: [A. K. Peters](https://en.wikipedia.org/wiki/A._K._Peters "A. K. Peters"). p. [51](https://archive.org/details/experimentationm00borw_656/page/n60). [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-1-56881-136-9](https://en.wikipedia.org/wiki/Special:BookSources/978-1-56881-136-9 "Special:BookSources/978-1-56881-136-9")
.
15. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-16)**
Hwang Chien-Lih (2005), "An elementary derivation of Euler's series for the arctangent function", *The Mathematical Gazette*, **89** (516): 469–470, [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1017/S0025557200178404](https://doi.org/10.1017%2FS0025557200178404), [S2CID](https://en.wikipedia.org/wiki/S2CID_\(identifier\) "S2CID (identifier)") [123395287](https://api.semanticscholar.org/CorpusID:123395287)
16. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-17)**
S. M. Abrarov and B. M. Quine (2018), "A formula for pi involving nested radicals", *The Ramanujan Journal*, **46** (3): 657–665, [arXiv](https://en.wikipedia.org/wiki/ArXiv_\(identifier\) "ArXiv (identifier)"):[1610\.07713](https://arxiv.org/abs/1610.07713), [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1007/s11139-018-9996-8](https://doi.org/10.1007%2Fs11139-018-9996-8), [S2CID](https://en.wikipedia.org/wiki/S2CID_\(identifier\) "S2CID (identifier)") [119150623](https://api.semanticscholar.org/CorpusID:119150623)
17. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-18)**
when a time varying angle crossing
±
π
/
2
{\\displaystyle \\pm \\pi /2}

should be mapped by a smooth line instead of a saw toothed one (robotics, astronomy, angular movement in general)\[*[citation needed](https://en.wikipedia.org/wiki/Wikipedia:Citation_needed "Wikipedia:Citation needed")*\]
18. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Gade_2010_19-0)**
Gade, Kenneth (2010). ["A non-singular horizontal position representation"](http://www.navlab.net/Publications/A_Nonsingular_Horizontal_Position_Representation.pdf) (PDF). *The Journal of Navigation*. **63** (3). [Cambridge University Press](https://en.wikipedia.org/wiki/Cambridge_University_Press "Cambridge University Press"): 395–417\. [Bibcode](https://en.wikipedia.org/wiki/Bibcode_\(identifier\) "Bibcode (identifier)"):[2010JNav...63..395G](https://ui.adsabs.harvard.edu/abs/2010JNav...63..395G). [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1017/S0373463309990415](https://doi.org/10.1017%2FS0373463309990415).
## External links
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=32 "Edit section: External links")\]
- [Weisstein, Eric W.](https://en.wikipedia.org/wiki/Eric_W._Weisstein "Eric W. Weisstein") ["Inverse Tangent"](https://mathworld.wolfram.com/InverseTangent.html). *[MathWorld](https://en.wikipedia.org/wiki/MathWorld "MathWorld")*.
| [v](https://en.wikipedia.org/wiki/Template:Trigonometric_and_hyperbolic_functions "Template:Trigonometric and hyperbolic functions") [t](https://en.wikipedia.org/wiki/Template_talk:Trigonometric_and_hyperbolic_functions "Template talk:Trigonometric and hyperbolic functions") [e](https://en.wikipedia.org/wiki/Special:EditPage/Template:Trigonometric_and_hyperbolic_functions "Special:EditPage/Template:Trigonometric and hyperbolic functions")Trigonometric and hyperbolic functions | |
|---|---|
| Groups | [Trigonometric](https://en.wikipedia.org/wiki/Trigonometric_functions "Trigonometric functions") [Sine and cosine](https://en.wikipedia.org/wiki/Sine_and_cosine "Sine and cosine") [Inverse trigonometric]() [Hyperbolic](https://en.wikipedia.org/wiki/Hyperbolic_functions "Hyperbolic functions") [Inverse hyperbolic](https://en.wikipedia.org/wiki/Inverse_hyperbolic_functions "Inverse hyperbolic functions") |
| Other | [Versine](https://en.wikipedia.org/wiki/Versine "Versine") [Exsecant](https://en.wikipedia.org/wiki/Exsecant "Exsecant") [Jyā, koti-jyā and utkrama-jyā](https://en.wikipedia.org/wiki/Jy%C4%81,_koti-jy%C4%81_and_utkrama-jy%C4%81 "Jyā, koti-jyā and utkrama-jyā") [atan2](https://en.wikipedia.org/wiki/Atan2 "Atan2") |

Retrieved from "<https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&oldid=1343100340>"
[Categories](https://en.wikipedia.org/wiki/Help:Category "Help:Category"):
- [Inverse trigonometric functions](https://en.wikipedia.org/wiki/Category:Inverse_trigonometric_functions "Category:Inverse trigonometric functions")
- [Trigonometry](https://en.wikipedia.org/wiki/Category:Trigonometry "Category:Trigonometry")
- [Elementary special functions](https://en.wikipedia.org/wiki/Category:Elementary_special_functions "Category:Elementary special functions")
- [Mathematical relations](https://en.wikipedia.org/wiki/Category:Mathematical_relations "Category:Mathematical relations")
- [Ratios](https://en.wikipedia.org/wiki/Category:Ratios "Category:Ratios")
- [Dimensionless numbers](https://en.wikipedia.org/wiki/Category:Dimensionless_numbers "Category:Dimensionless numbers")
- [Sigmoid functions](https://en.wikipedia.org/wiki/Category:Sigmoid_functions "Category:Sigmoid functions")
Hidden categories:
- [CS1 location test](https://en.wikipedia.org/wiki/Category:CS1_location_test "Category:CS1 location test")
- [CS1: long volume value](https://en.wikipedia.org/wiki/Category:CS1:_long_volume_value "Category:CS1: long volume value")
- [CS1 German-language sources (de)](https://en.wikipedia.org/wiki/Category:CS1_German-language_sources_\(de\) "Category:CS1 German-language sources (de)")
- [CS1 errors: ISBN date](https://en.wikipedia.org/wiki/Category:CS1_errors:_ISBN_date "Category:CS1 errors: ISBN date")
- [CS1 maint: DOI inactive as of July 2025](https://en.wikipedia.org/wiki/Category:CS1_maint:_DOI_inactive_as_of_July_2025 "Category:CS1 maint: DOI inactive as of July 2025")
- [All articles with unsourced statements](https://en.wikipedia.org/wiki/Category:All_articles_with_unsourced_statements "Category:All articles with unsourced statements")
- [Articles with unsourced statements from March 2020](https://en.wikipedia.org/wiki/Category:Articles_with_unsourced_statements_from_March_2020 "Category:Articles with unsourced statements from March 2020")
- [Articles with short description](https://en.wikipedia.org/wiki/Category:Articles_with_short_description "Category:Articles with short description")
- [Short description is different from Wikidata](https://en.wikipedia.org/wiki/Category:Short_description_is_different_from_Wikidata "Category:Short description is different from Wikidata")
- [Use dmy dates from July 2022](https://en.wikipedia.org/wiki/Category:Use_dmy_dates_from_July_2022 "Category:Use dmy dates from July 2022")
- [Articles with unsourced statements from January 2019](https://en.wikipedia.org/wiki/Category:Articles_with_unsourced_statements_from_January_2019 "Category:Articles with unsourced statements from January 2019")
- This page was last edited on 12 March 2026, at 07:06 (UTC).
- Text is available under the [Creative Commons Attribution-ShareAlike 4.0 License](https://en.wikipedia.org/wiki/Wikipedia:Text_of_the_Creative_Commons_Attribution-ShareAlike_4.0_International_License "Wikipedia:Text of the Creative Commons Attribution-ShareAlike 4.0 International License"); additional terms may apply. By using this site, you agree to the [Terms of Use](https://foundation.wikimedia.org/wiki/Special:MyLanguage/Policy:Terms_of_Use "foundation:Special:MyLanguage/Policy:Terms of Use") and [Privacy Policy](https://foundation.wikimedia.org/wiki/Special:MyLanguage/Policy:Privacy_policy "foundation:Special:MyLanguage/Policy:Privacy policy"). Wikipedia® is a registered trademark of the [Wikimedia Foundation, Inc.](https://wikimediafoundation.org/), a non-profit organization.
- [Privacy policy](https://foundation.wikimedia.org/wiki/Special:MyLanguage/Policy:Privacy_policy)
- [About Wikipedia](https://en.wikipedia.org/wiki/Wikipedia:About)
- [Disclaimers](https://en.wikipedia.org/wiki/Wikipedia:General_disclaimer)
- [Contact Wikipedia](https://en.wikipedia.org/wiki/Wikipedia:Contact_us)
- [Legal & safety contacts](https://foundation.wikimedia.org/wiki/Special:MyLanguage/Legal:Wikimedia_Foundation_Legal_and_Safety_Contact_Information)
- [Code of Conduct](https://foundation.wikimedia.org/wiki/Special:MyLanguage/Policy:Universal_Code_of_Conduct)
- [Developers](https://developer.wikimedia.org/)
- [Statistics](https://stats.wikimedia.org/#/en.wikipedia.org)
- [Cookie statement](https://foundation.wikimedia.org/wiki/Special:MyLanguage/Policy:Cookie_statement)
- [Mobile view](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&mobileaction=toggle_view_mobile)
- [](https://www.wikimedia.org/)
- [](https://www.mediawiki.org/)
Search
Toggle the table of contents
Inverse trigonometric functions
53 languages
[Add topic](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions) | |||||||||
| Readable Markdown | In [mathematics](https://en.wikipedia.org/wiki/Mathematics "Mathematics"), the **inverse trigonometric functions** (occasionally also called *antitrigonometric*,[\[1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Hall_1909-1) *cyclometric*,[\[2\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-cyclometric-2) or *arcus* functions[\[3\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-arcus-3)) are the [inverse functions](https://en.wikipedia.org/wiki/Inverse_function "Inverse function") of the [trigonometric functions](https://en.wikipedia.org/wiki/Trigonometric_functions "Trigonometric functions"), under suitably restricted [domains](https://en.wikipedia.org/wiki/Domain_of_a_function "Domain of a function"). Specifically, they are the inverses of the [sine](https://en.wikipedia.org/wiki/Sine "Sine"), [cosine](https://en.wikipedia.org/wiki/Cosine "Cosine"), [tangent](https://en.wikipedia.org/wiki/Tangent_\(trigonometry\) "Tangent (trigonometry)"), [cotangent](https://en.wikipedia.org/wiki/Cotangent "Cotangent"), [secant](https://en.wikipedia.org/wiki/Secant_\(trigonometry\) "Secant (trigonometry)"), and [cosecant](https://en.wikipedia.org/wiki/Cosecant "Cosecant") functions,[\[4\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-4) and are used to obtain an angle from any of the angle's trigonometric ratios. Inverse trigonometric functions are widely used in [engineering](https://en.wikipedia.org/wiki/Engineering "Engineering"), [navigation](https://en.wikipedia.org/wiki/Navigation "Navigation"), [physics](https://en.wikipedia.org/wiki/Physics "Physics"), and [geometry](https://en.wikipedia.org/wiki/Geometry "Geometry").
[](https://en.wikipedia.org/wiki/File:Arcsin_and_arccos_as_actual_arc_lengths.svg)
For a circle of radius 1, arcsin and arccos are the lengths of actual arcs determined by the quantities in question.
Several notations for the inverse trigonometric functions exist. The most common convention is to name inverse trigonometric functions using an arc- prefix: arcsin(*x*), arccos(*x*), arctan(*x*), etc.[\[1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Hall_1909-1) (This convention is used throughout this article.) This notation arises from the following geometric relationships:\[*[citation needed](https://en.wikipedia.org/wiki/Wikipedia:Citation_needed "Wikipedia:Citation needed")*\] when measuring in radians, an angle of θ radians will correspond to an [arc](https://en.wikipedia.org/wiki/Circular_arc "Circular arc") whose length is rθ, where r is the radius of the circle. Thus in the [unit circle](https://en.wikipedia.org/wiki/Unit_circle "Unit circle"), the cosine of x function is both the arc and the angle, because the arc of a circle of radius 1 is the same as the angle. Or, "the arc whose cosine is x" is the same as "the angle whose cosine is x", because the length of the arc of the circle in radii is the same as the measurement of the angle in radians.[\[5\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Americana_1912-5) In computer programming languages, the inverse trigonometric functions are often called by the abbreviated forms asin, acos, atan.[\[6\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-6)
The notations sin−1(*x*), cos−1(*x*), tan−1(*x*), etc., as introduced by [John Herschel](https://en.wikipedia.org/wiki/John_Herschel "John Herschel") in 1813,[\[7\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Cajori-7)[\[8\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Herschel_1813-8) are often used as well in English-language sources,[\[1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Hall_1909-1) much more than the also [established](https://en.wikipedia.org/wiki/Iterated_function#Definition "Iterated function") sin\[−1\](*x*), cos\[−1\](*x*), tan\[−1\](*x*) – conventions consistent with the notation of an [inverse function](https://en.wikipedia.org/wiki/Inverse_function "Inverse function"), that is useful (for example) to define the [multivalued](https://en.wikipedia.org/wiki/Multivalued_function "Multivalued function") version of each inverse trigonometric function:  However, this might appear to conflict logically with the common semantics for expressions such as sin2(*x*) (although only sin2 *x*, without parentheses, is the really common use), which refer to numeric power rather than [function composition](https://en.wikipedia.org/wiki/Function_composition "Function composition"), and therefore may result in confusion between notation for the [reciprocal](https://en.wikipedia.org/wiki/Reciprocal_\(mathematics\) "Reciprocal (mathematics)") ([multiplicative inverse](https://en.wikipedia.org/wiki/Multiplicative_inverse "Multiplicative inverse")) and [inverse function](https://en.wikipedia.org/wiki/Inverse_function "Inverse function").[\[9\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-9)
The confusion is somewhat mitigated by the fact that each of the reciprocal trigonometric functions has its own name — for example, (cos(*x*))−1 = sec(*x*). Nevertheless, certain authors advise against using it, since it is ambiguous.[\[1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Hall_1909-1)[\[10\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Korn_2000-10) Another precarious convention used by a small number of authors is to use an [uppercase](https://en.wikipedia.org/wiki/UPPERCASE "UPPERCASE") first letter, along with a “−1” superscript: Sin−1(*x*), Cos−1(*x*), Tan−1(*x*), etc.[\[11\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Bhatti_1999-11) Although it is intended to avoid confusion with the [reciprocal](https://en.wikipedia.org/wiki/Reciprocal_\(mathematics\) "Reciprocal (mathematics)"), which should be represented by sin−1(*x*), cos−1(*x*), etc., or, better, by sin−1 *x*, cos−1 *x*, etc., it in turn creates yet another major source of ambiguity, especially since many popular high-level programming languages (e.g. [Mathematica](https://en.wikipedia.org/wiki/Mathematica "Mathematica") and [MAGMA](https://en.wikipedia.org/wiki/Magma_\(computer_algebra_system\) "Magma (computer algebra system)")) use those very same capitalised representations for the standard trig functions, whereas others ([Python](https://en.wikipedia.org/wiki/Python_\(programming_language\) "Python (programming language)"), [SymPy](https://en.wikipedia.org/wiki/SymPy "SymPy"), [NumPy](https://en.wikipedia.org/wiki/NumPy "NumPy"), [Matlab](https://en.wikipedia.org/wiki/Matlab "Matlab"), [MAPLE](https://en.wikipedia.org/wiki/Maple_\(software\) "Maple (software)"), etc.) use lower-case.
Hence, since 2009, the [ISO 80000-2](https://en.wikipedia.org/wiki/ISO_80000-2#Part_2:_Mathematics "ISO 80000-2") standard has specified solely the "arc" prefix for the inverse functions.
[](https://en.wikipedia.org/wiki/File:TrigFunctionDiagram.svg)
The points labelled 1, Sec(*θ*), Csc(*θ*) represent the length of the line segment from the origin to that point. Sin(*θ*), Tan(*θ*), and 1 are the heights to the line starting from the x\-axis, while Cos(*θ*), 1, and Cot(*θ*) are lengths along the x\-axis starting from the origin.
Since none of the six trigonometric functions are [one-to-one](https://en.wikipedia.org/wiki/One-to-one_function "One-to-one function"), they must be restricted in order to have inverse functions. Therefore, the result [ranges](https://en.wikipedia.org/wiki/Range_of_a_function "Range of a function") of the inverse functions are proper (i.e. strict) [subsets](https://en.wikipedia.org/wiki/Subset "Subset") of the domains of the original functions.
For example, using *function* in the sense of [multivalued functions](https://en.wikipedia.org/wiki/Multivalued_function "Multivalued function"), just as the [square root](https://en.wikipedia.org/wiki/Square_root "Square root") function  could be defined from  the function  is defined so that  For a given [real number](https://en.wikipedia.org/wiki/Real_number "Real number")  with  there are multiple (in fact, [countably infinitely](https://en.wikipedia.org/wiki/Countably_infinite "Countably infinite") many) numbers  such that ; for example,  but also   etc. When only one value is desired, the function may be restricted to its [principal branch](https://en.wikipedia.org/wiki/Principal_branch "Principal branch"). With this restriction, for each  in the domain, the expression  will evaluate only to a single value, called its [principal value](https://en.wikipedia.org/wiki/Principal_value "Principal value"). These properties apply to all the inverse trigonometric functions.
The principal inverses are listed in the following table.
| Name | Usual notation | Definition | Domain of x for real result | Range of usual principal value ([radians](https://en.wikipedia.org/wiki/Radian "Radian")) | Range of usual principal value ([degrees](https://en.wikipedia.org/wiki/Degree_\(angle\) "Degree (angle)")) |
|---|---|---|---|---|---|
| arcsine | *y* = arcsin(*x*) | *x* = [sin](https://en.wikipedia.org/wiki/Sine "Sine")(*y*) | −1 ≤ *x* ≤ 1 | −π/2 ≤ *y* ≤ π/2 | −90° ≤ *y* ≤ 90° |
| arccosine | *y* = arccos(*x*) | *x* = [cos](https://en.wikipedia.org/wiki/Cosine "Cosine")(*y*) | −1 ≤ *x* ≤ 1 | 0 ≤ *y* ≤ π | 0° ≤ *y* ≤ 180° |
| arctangent | *y* = arctan(*x*) | *x* = [tan](https://en.wikipedia.org/wiki/Tangent_\(trigonometry\) "Tangent (trigonometry)")(*y*) | all real numbers | −π/2 \< *y* \< π/2 | −90° \< *y* \< 90° |
| arccotangent | *y* = arccot(*x*) | *x* = [cot](https://en.wikipedia.org/wiki/Cotangent "Cotangent")(*y*) | all real numbers | 0 \< *y* \< π | 0° \< *y* \< 180° |
| arcsecant | *y* = arcsec(*x*) | *x* = [sec](https://en.wikipedia.org/wiki/Secant_\(trigonometry\) "Secant (trigonometry)")(*y*) | \|*x*\| ≥ 1 | 0 ≤ *y* \< π/2 or π/2 \< *y* ≤ π | 0° ≤ *y* \< 90° or 90° \< *y* ≤ 180° |
| arccosecant | *y* = arccsc(*x*) | *x* = [csc](https://en.wikipedia.org/wiki/Cosecant "Cosecant")(*y*) | \|*x*\| ≥ 1 | −π/2 ≤ *y* \< 0 or 0 \< *y* ≤ π/2 | −90° ≤ *y* \< 0 or 0° \< *y* ≤ 90° |
Note: Some authors define the range of arcsecant to be ( or  ),[\[12\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-12) because the tangent function is nonnegative on this domain. This makes some computations more consistent. For example, using this range,  whereas with the range ( or ), we would have to write  since tangent is nonnegative on  but nonpositive on  For a similar reason, the same authors define the range of arccosecant to be  or 
If x is allowed to be a [complex number](https://en.wikipedia.org/wiki/Complex_number "Complex number"), then the range of y applies only to its real part.
The table below displays names and domains of the inverse trigonometric functions along with the [range](https://en.wikipedia.org/wiki/Image_of_a_function "Image of a function") of their usual [principal values](https://en.wikipedia.org/wiki/Principal_value "Principal value") in [radians](https://en.wikipedia.org/wiki/Radians "Radians").
| Name | Symbol | | [Domain](https://en.wikipedia.org/wiki/Domain_of_a_function "Domain of a function") | | [Image/Range](https://en.wikipedia.org/wiki/Image_of_a_function "Image of a function") | Inverse function | | Domain | | [Image](https://en.wikipedia.org/wiki/Image_of_a_function "Image of a function") of [principal values](https://en.wikipedia.org/wiki/Principal_value "Principal value") |
|---|---|---|---|---|---|---|---|---|---|---|
| [sine](https://en.wikipedia.org/wiki/Sine "Sine") |  | | | | | | | | | |
The symbol  denotes the set of all [real numbers](https://en.wikipedia.org/wiki/Real_number "Real number") and  denotes the set of all [integers](https://en.wikipedia.org/wiki/Integer "Integer"). The set of all integer multiples of  is denoted by

The symbol  denotes [set subtraction](https://en.wikipedia.org/wiki/Set_subtraction "Set subtraction") so that, for instance, ![{\\displaystyle \\mathbb {R} \\setminus (-1,1)=(-\\infty ,-1\]\\cup \[1,\\infty )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/105fc2887189c9dbf0d165542a768dcd97f03069) is the set of points in  (that is, real numbers) that are *not* in the interval 
The [Minkowski sum](https://en.wikipedia.org/wiki/Minkowski_sum "Minkowski sum") notation  and  that is used above to concisely write the domains of  is now explained.
**Domain of cotangent  and cosecant **: The domains of  and  are the same. They are the set of all angles  at which  i.e. all real numbers that are *not* of the form  for some integer 

**Domain of tangent  and secant **: The domains of  and  are the same. They are the set of all angles  at which 

### Solutions to elementary trigonometric equations
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=5 "Edit section: Solutions to elementary trigonometric equations")\]
Each of the trigonometric functions is periodic in the real part of its argument, running through all its values twice in each interval of 
This periodicity is reflected in the general inverses, where  is some integer.
The following table shows how inverse trigonometric functions may be used to solve equalities involving the six standard trigonometric functions. It is assumed that the given values     and  all lie within appropriate ranges so that the relevant expressions below are [well-defined](https://en.wikipedia.org/wiki/Well-defined "Well-defined"). Note that "for some " is just another way of saying "for some [integer](https://en.wikipedia.org/wiki/Integer "Integer") "
The symbol  is [logical equality](https://en.wikipedia.org/wiki/Logical_equality "Logical equality") and indicates that if the left hand side is true then so is the right hand side and, conversely, if the right hand side is true then so is the left hand side (see this footnote[\[note 1\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-13) for more details and an example illustrating this concept).
| Equation | [if and only if](https://en.wikipedia.org/wiki/If_and_only_if "If and only if") | Solution |
|---|---|---|
|  | | |
where the first four solutions can be written in expanded form as:
| Equation | [if and only if](https://en.wikipedia.org/wiki/If_and_only_if "If and only if") | Solution |
|---|---|---|
|  | | |
For example, if  then  for some  While if  then  for some  where  will be even if  and it will be odd if  The equations  and  have the same solutions as  and  respectively. In all equations above *except* for those just solved (i.e. except for / and /), the integer  in the solution's formula is uniquely determined by  (for fixed  and ).
With the help of [integer parity](https://en.wikipedia.org/wiki/Parity_\(mathematics\) "Parity (mathematics)")  it is possible to write a solution to  that doesn't involve the "plus or minus"  symbol:
 if and only if  for some 
And similarly for the secant function,
 if and only if  for some 
where  equals  when the integer  is even, and equals  when it's odd.
#### Detailed example and explanation of the "plus or minus" symbol ±
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=6 "Edit section: Detailed example and explanation of the \"plus or minus\" symbol ±")\]
The solutions to  and  involve the "plus or minus" symbol  whose meaning is now clarified. Only the solution to  will be discussed since the discussion for  is the same. We are given  between  and we know that there is an angle  in some interval that satisfies  We want to find this  The table above indicates that the solution is  which is a shorthand way of saying that (at least) one of the following statement is true:
1.  for some integer 
or
2.  for some integer 
As mentioned above, if  (which by definition only happens when ) then both statements (1) and (2) hold, although with different values for the integer : if  is the integer from statement (1), meaning that  holds, then the integer  for statement (2) is  (because ). However, if  then the integer  is unique and completely determined by  If  (which by definition only happens when ) then  (because  and  so in both cases  is equal to ) and so the statements (1) and (2) happen to be identical in this particular case (and so both hold). Having considered the cases  and  we now focus on the case where  and  So assume this from now on. The solution to  is still  which as before is shorthand for saying that one of statements (1) and (2) is true. However this time, because  and  statements (1) and (2) are different and furthermore, *exactly one* of the two equalities holds (not both). Additional information about  is needed to determine which one holds. For example, suppose that  and that *all* that is known about  is that  (and nothing more is known). Then  and moreover, in this particular case  (for both the  case and the  case) and so consequently,  This means that  could be either  or  Without additional information it is not possible to determine which of these values  has. An example of some additional information that could determine the value of  would be knowing that the angle is above the \-axis (in which case ) or alternatively, knowing that it is below the \-axis (in which case ).
#### Equal identical trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=7 "Edit section: Equal identical trigonometric functions")\]
The table below shows how two angles  and  must be related if their values under a given trigonometric function are equal or negatives of each other.
| Equation | [if and only if](https://en.wikipedia.org/wiki/If_and_only_if "If and only if") | Solution (for some ) |
|---|---|---|
The vertical double arrow [](https://en.wikipedia.org/wiki/Logical_equality "Logical equality") in the last row indicates that  and  satisfy  if and only if they satisfy 
Set of all solutions to elementary trigonometric equations
Thus given a single solution  to an elementary trigonometric equation ( is such an equation, for instance, and because  always holds,  is always a solution), the set of all solutions to it are:
| If  solves |
|---|
### Transforming equations
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=8 "Edit section: Transforming equations")\]
The equations above can be transformed by using the reflection and shift identities:[\[13\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-14)
| Argument:  |
|---|
These formulas imply, in particular, that the following hold:
![{\\displaystyle {\\begin{aligned}\\sin \\theta &=-\\sin(-\\theta )&&=-\\sin(\\pi +\\theta )&&={\\phantom {-}}\\sin(\\pi -\\theta )\\\\&=-\\cos \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cos \\left({\\frac {\\pi }{2}}-\\theta \\right)&&=-\\cos \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&={\\phantom {-}}\\cos \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&=-\\cos \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&=-\\cos \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\cos \\theta &={\\phantom {-}}\\cos(-\\theta )&&=-\\cos(\\pi +\\theta )&&=-\\cos(\\pi -\\theta )\\\\&={\\phantom {-}}\\sin \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\sin \\left({\\frac {\\pi }{2}}-\\theta \\right)&&=-\\sin \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&=-\\sin \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&=-\\sin \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&={\\phantom {-}}\\sin \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\tan \\theta &=-\\tan(-\\theta )&&={\\phantom {-}}\\tan(\\pi +\\theta )&&=-\\tan(\\pi -\\theta )\\\\&=-\\cot \\left({\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cot \\left({\\frac {\\pi }{2}}-\\theta \\right)&&={\\phantom {-}}\\cot \\left(-{\\frac {\\pi }{2}}-\\theta \\right)\\\\&=-\\cot \\left(-{\\frac {\\pi }{2}}+\\theta \\right)&&={\\phantom {-}}\\cot \\left({\\frac {3\\pi }{2}}-\\theta \\right)&&=-\\cot \\left(-{\\frac {3\\pi }{2}}+\\theta \\right)\\\\\[0.3ex\]\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/316baee0254e64a99779ac4721054f23295aeec6)
where swapping  swapping  and swapping  gives the analogous equations for  respectively.
So for example, by using the equality  the equation  can be transformed into  which allows for the solution to the equation  (where ) to be used; that solution being:  which becomes:  where using the fact that  and substituting  proves that another solution to  is:  The substitution  may be used express the right hand side of the above formula in terms of  instead of 
### Relationships between trigonometric functions and inverse trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=9 "Edit section: Relationships between trigonometric functions and inverse trigonometric functions")\]
Trigonometric functions of inverse trigonometric functions are tabulated below. They may be derived from the Pythagorean identities. Another way is by considering the geometry of a right-angled triangle, with one side of length 1 and another side of length  then applying the [Pythagorean theorem](https://en.wikipedia.org/wiki/Pythagorean_theorem "Pythagorean theorem") and definitions of the trigonometric ratios. It is worth noting that for arcsecant and arccosecant, the diagram assumes that  is positive, and thus the result has to be corrected through the use of [absolute values](https://en.wikipedia.org/wiki/Absolute_value "Absolute value") and the [signum](https://en.wikipedia.org/wiki/Sign_function "Sign function") (sgn) operation.
|  |
|---|
### Relationships among the inverse trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=10 "Edit section: Relationships among the inverse trigonometric functions")\]
[](https://en.wikipedia.org/wiki/File:Arcsine_Arccosine.svg)
The usual principal values of the arcsin(*x*) (red) and arccos(*x*) (blue) functions graphed on the cartesian plane.
[](https://en.wikipedia.org/wiki/File:Arctangent_Arccotangent.svg)
The usual principal values of the arctan(*x*) and arccot(*x*) functions graphed on the cartesian plane.
[](https://en.wikipedia.org/wiki/File:Arcsecant_Arccosecant.svg)
Principal values of the arcsec(*x*) and arccsc(*x*) functions graphed on the cartesian plane.
Complementary angles:
![{\\displaystyle {\\begin{aligned}\\arccos(x)&={\\frac {\\pi }{2}}-\\arcsin(x)\\\\\[0.5em\]\\operatorname {arccot} (x)&={\\frac {\\pi }{2}}-\\arctan(x)\\\\\[0.5em\]\\operatorname {arccsc} (x)&={\\frac {\\pi }{2}}-\\operatorname {arcsec} (x)\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec43798232f580abb074cf15f3d77692edd36af0)
Negative arguments:

Reciprocal arguments:
![{\\displaystyle {\\begin{aligned}\\arcsin \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccsc} (x)&\\\\\[0.3em\]\\operatorname {arccsc} \\left({\\frac {1}{x}}\\right)&=\\arcsin(x)&\\\\\[0.3em\]\\arccos \\left({\\frac {1}{x}}\\right)&=\\operatorname {arcsec} (x)&\\\\\[0.3em\]\\operatorname {arcsec} \\left({\\frac {1}{x}}\\right)&=\\arccos(x)&\\\\\[0.3em\]\\arctan \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccot} (x)&={\\frac {\\pi }{2}}-\\arctan(x)\\,,{\\text{ if }}x\>0\\\\\[0.3em\]\\arctan \\left({\\frac {1}{x}}\\right)&=\\operatorname {arccot} (x)-\\pi &=-{\\frac {\\pi }{2}}-\\arctan(x)\\,,{\\text{ if }}x\<0\\\\\[0.3em\]\\operatorname {arccot} \\left({\\frac {1}{x}}\\right)&=\\arctan(x)&={\\frac {\\pi }{2}}-\\operatorname {arccot} (x)\\,,{\\text{ if }}x\>0\\\\\[0.3em\]\\operatorname {arccot} \\left({\\frac {1}{x}}\\right)&=\\arctan(x)+\\pi &={\\frac {3\\pi }{2}}-\\operatorname {arccot} (x)\\,,{\\text{ if }}x\<0\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2fca7d530f42c84ed92b5895ccbafb013dc6645)
The identities above can be used with (and derived from) the fact that  and  are [reciprocals](https://en.wikipedia.org/wiki/Multiplicative_inverse "Multiplicative inverse") (i.e. ), as are  and  and  and 
Useful identities if one only has a fragment of a sine table:

Whenever the square root of a complex number is used here, we choose the root with the positive real part (or positive imaginary part if the square was negative real).
A useful form that follows directly from the table above is
.
It is obtained by recognizing that .
From the [half-angle formula](https://en.wikipedia.org/wiki/Tangent_half-angle_formula "Tangent half-angle formula"), , we get:
![{\\displaystyle {\\begin{aligned}\\arcsin(x)&=2\\arctan \\left({\\frac {x}{1+{\\sqrt {1-x^{2}}}}}\\right)\\\\\[0.5em\]\\arccos(x)&=2\\arctan \\left({\\frac {\\sqrt {1-x^{2}}}{1+x}}\\right)\\,,{\\text{ if }}-1\<x\\leq 1\\\\\[0.5em\]\\arctan(x)&=2\\arctan \\left({\\frac {x}{1+{\\sqrt {1+x^{2}}}}}\\right)\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7dd6a9370a877ca5e198e28b7582bd06b377bdc3)
### Arctangent addition formula
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=11 "Edit section: Arctangent addition formula")\]

This is derived from the tangent [addition formula](https://en.wikipedia.org/wiki/Angle_sum_and_difference_identities "Angle sum and difference identities")

by letting

### Derivatives of inverse trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=13 "Edit section: Derivatives of inverse trigonometric functions")\]
The [derivatives](https://en.wikipedia.org/wiki/Derivative "Derivative") for complex values of *z* are as follows:

Only for real values of *x*:

These formulas can be derived in terms of the derivatives of trigonometric functions. For example, if , then  so

### Expression as definite integrals
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=14 "Edit section: Expression as definite integrals")\]
Integrating the derivative and fixing the value at one point gives an expression for the inverse trigonometric function as a [definite integral](https://en.wikipedia.org/wiki/Definite_integral "Definite integral"):

When *x* equals 1, the integrals with limited domains are [improper integrals](https://en.wikipedia.org/wiki/Improper_integral "Improper integral"), but still well-defined.
Similar to the sine and cosine functions, the inverse trigonometric functions can also be calculated using [power series](https://en.wikipedia.org/wiki/Power_series "Power series"), as follows. For arcsine, the series can be derived by expanding its derivative, , as a [binomial series](https://en.wikipedia.org/wiki/Binomial_series "Binomial series"), and integrating term by term (using the integral definition as above). The series for arctangent can similarly be derived by expanding its derivative  in a [geometric series](https://en.wikipedia.org/wiki/Geometric_series "Geometric series"), and applying the integral definition above (see [Leibniz series](https://en.wikipedia.org/wiki/Leibniz_series "Leibniz series")).
![{\\displaystyle {\\begin{aligned}\\arcsin(z)&=z+\\left({\\frac {1}{2}}\\right){\\frac {z^{3}}{3}}+\\left({\\frac {1\\cdot 3}{2\\cdot 4}}\\right){\\frac {z^{5}}{5}}+\\left({\\frac {1\\cdot 3\\cdot 5}{2\\cdot 4\\cdot 6}}\\right){\\frac {z^{7}}{7}}+\\cdots \\\\\[5pt\]&=\\sum \_{n=0}^{\\infty }{\\frac {(2n-1)!!}{(2n)!!}}{\\frac {z^{2n+1}}{2n+1}}\\\\\[5pt\]&=\\sum \_{n=0}^{\\infty }{\\frac {(2n)!}{(2^{n}n!)^{2}}}{\\frac {z^{2n+1}}{2n+1}}\\,;\\qquad \|z\|\\leq 1\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a0f778db7f760db059cf12f13ee5c2bf239fbb2f) The [Taylor series](https://en.wikipedia.org/wiki/Taylor_series "Taylor series") for arctangent is also known as the [arctangent series](https://en.wikipedia.org/wiki/Arctangent_series "Arctangent series") or Gregory's series. 
Series for the other inverse trigonometric functions can be given in terms of these according to the relationships given above. For example, , , and so on. Another series is given by:[\[14\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Borwein_2004-15)

[Leonhard Euler](https://en.wikipedia.org/wiki/Leonhard_Euler "Leonhard Euler") found a series for the arctangent that converges more quickly than its [Taylor series](https://en.wikipedia.org/wiki/Taylor_series "Taylor series"):
[\[15\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-16) (The term in the sum for *n* = 0 is the [empty product](https://en.wikipedia.org/wiki/Empty_product "Empty product"), so is 1.)
Alternatively, this can be expressed as

Another series for the arctangent function is given by

where  is the [imaginary unit](https://en.wikipedia.org/wiki/Imaginary_unit "Imaginary unit").[\[16\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-17)
#### Continued fractions for arctangent
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=16 "Edit section: Continued fractions for arctangent")\]
Two alternatives to the power series for arctangent are these [generalized continued fractions](https://en.wikipedia.org/wiki/Generalized_continued_fraction "Generalized continued fraction"):

The second of these is valid in the cut complex plane. There are two cuts, from −**i** to the [point at infinity](https://en.wikipedia.org/wiki/Point_at_infinity "Point at infinity"), going down the imaginary axis, and from **i** to the point at infinity, going up the same axis. It works best for real numbers running from −1 to 1. The partial denominators are the odd natural numbers, and the partial numerators (after the first) are just (*nz*)2, with each perfect square appearing once. The first was developed by [Leonhard Euler](https://en.wikipedia.org/wiki/Leonhard_Euler "Leonhard Euler"), the second by [Carl Friedrich Gauss](https://en.wikipedia.org/wiki/Carl_Friedrich_Gauss "Carl Friedrich Gauss") utilizing the [Gaussian hypergeometric series](https://en.wikipedia.org/wiki/Gaussian_hypergeometric_series "Gaussian hypergeometric series").
### Indefinite integrals of inverse trigonometric functions
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=17 "Edit section: Indefinite integrals of inverse trigonometric functions")\]
For real and complex values of *z*:
![{\\displaystyle {\\begin{aligned}\\int \\arcsin(z)\\,dz&{}=z\\,\\arcsin(z)+{\\sqrt {1-z^{2}}}+C\\\\\\int \\arccos(z)\\,dz&{}=z\\,\\arccos(z)-{\\sqrt {1-z^{2}}}+C\\\\\\int \\arctan(z)\\,dz&{}=z\\,\\arctan(z)-{\\frac {1}{2}}\\ln \\left(1+z^{2}\\right)+C\\\\\\int \\operatorname {arccot} (z)\\,dz&{}=z\\,\\operatorname {arccot} (z)+{\\frac {1}{2}}\\ln \\left(1+z^{2}\\right)+C\\\\\\int \\operatorname {arcsec} (z)\\,dz&{}=z\\,\\operatorname {arcsec} (z)-\\ln \\left\[z\\left(1+{\\sqrt {\\frac {z^{2}-1}{z^{2}}}}\\right)\\right\]+C\\\\\\int \\operatorname {arccsc} (z)\\,dz&{}=z\\,\\operatorname {arccsc} (z)+\\ln \\left\[z\\left(1+{\\sqrt {\\frac {z^{2}-1}{z^{2}}}}\\right)\\right\]+C\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3e2dde92bb82231c4326e45ce8b50e7298688bb)
For real *x* ≥ 1:

For all real *x* not between -1 and 1:

The absolute value is necessary to compensate for both negative and positive values of the arcsecant and arccosecant functions. The signum function is also necessary due to the absolute values in the [derivatives](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Derivatives) of the two functions, which create two different solutions for positive and negative values of x. These can be further simplified using the logarithmic definitions of the [inverse hyperbolic functions](https://en.wikipedia.org/wiki/Inverse_hyperbolic_functions#Logarithmic_representation "Inverse hyperbolic functions"):

The absolute value in the argument of the arcosh function creates a negative half of its graph, making it identical to the signum logarithmic function shown above.
All of these antiderivatives can be derived using [integration by parts](https://en.wikipedia.org/wiki/Integration_by_parts "Integration by parts") and the simple derivative forms shown above.
Using  (i.e. [integration by parts](https://en.wikipedia.org/wiki/Integration_by_parts "Integration by parts")), set

Then

which by the simple [substitution](https://en.wikipedia.org/wiki/Integration_by_substitution "Integration by substitution")  yields the final result:

## Extension to the complex plane
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=19 "Edit section: Extension to the complex plane")\]
[](https://en.wikipedia.org/wiki/File:Riemann_surface_for_Arg_of_ArcTan_of_x.svg)
A [Riemann surface](https://en.wikipedia.org/wiki/Riemann_surface "Riemann surface") for the argument of the relation tan *z* = *x*. The orange sheet in the middle is the principal sheet representing arctan *x*. The blue sheet above and green sheet below are displaced by 2*π* and −2*π* respectively.
Since the inverse trigonometric functions are [analytic functions](https://en.wikipedia.org/wiki/Analytic_function "Analytic function"), they can be extended from the [real line](https://en.wikipedia.org/wiki/Number_line "Number line") to the complex plane. This results in functions with multiple sheets and [branch points](https://en.wikipedia.org/wiki/Branch_point "Branch point"). One possible way of defining the extension is:

where the part of the imaginary axis which does not lie strictly between the branch points (−i and +i) is the [branch cut](https://en.wikipedia.org/wiki/Branch_cut "Branch cut") between the principal sheet and other sheets. The path of the integral must not cross a branch cut. For *z* not on a branch cut, a straight line path from 0 to *z* is such a path. For *z* on a branch cut, the path must approach from Re\[x\] \> 0 for the upper branch cut and from Re\[x\] \< 0 for the lower branch cut.
The arcsine function may then be defined as:

where (the square-root function has its cut along the negative real axis and) the part of the real axis which does not lie strictly between −1 and +1 is the branch cut between the principal sheet of arcsin and other sheets;

which has the same cut as arcsin;

which has the same cut as arctan;

where the part of the real axis between −1 and +1 inclusive is the cut between the principal sheet of arcsec and other sheets;

which has the same cut as arcsec.
These functions may also be expressed using [complex logarithms](https://en.wikipedia.org/wiki/Complex_logarithm "Complex logarithm"). This extends their [domains](https://en.wikipedia.org/wiki/Domain_of_a_function "Domain of a function") to the [complex plane](https://en.wikipedia.org/wiki/Complex_plane "Complex plane") in a natural fashion. The following identities for principal values of the functions hold everywhere that they are defined, even on their branch cuts.
![{\\displaystyle {\\begin{aligned}\\arcsin(z)&{}=-i\\ln \\left({\\sqrt {1-z^{2}}}+iz\\right)=i\\ln \\left({\\sqrt {1-z^{2}}}-iz\\right)&{}=\\operatorname {arccsc} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\arccos(z)&{}=-i\\ln \\left(z+i{\\sqrt {1-z^{2}}}\\right)=i\\ln \\left(z-i{\\sqrt {1-z^{2}}}\\right)={\\frac {\\pi }{2}}-\\arcsin(z)&{}=\\operatorname {arcsec} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\arctan(z)&{}=-{\\frac {i}{2}}\\ln \\left({\\frac {i-z}{i+z}}\\right)=-{\\frac {i}{2}}\\ln \\left({\\frac {1+iz}{1-iz}}\\right)&{}=\\operatorname {arccot} \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arccot} (z)&{}=-{\\frac {i}{2}}\\ln \\left({\\frac {z+i}{z-i}}\\right)=-{\\frac {i}{2}}\\ln \\left({\\frac {iz-1}{iz+1}}\\right)&{}=\\arctan \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arcsec} (z)&{}=-i\\ln \\left({\\frac {1}{z}}+i{\\sqrt {1-{\\frac {1}{z^{2}}}}}\\right)=i\\ln \\left({\\frac {1}{z}}-i{\\sqrt {1-{\\frac {1}{z^{2}}}}}\\right)={\\frac {\\pi }{2}}-\\operatorname {arccsc} (z)&{}=\\arccos \\left({\\frac {1}{z}}\\right)\\\\\[10pt\]\\operatorname {arccsc} (z)&{}=-i\\ln \\left({\\sqrt {1-{\\frac {1}{z^{2}}}}}+{\\frac {i}{z}}\\right)=i\\ln \\left({\\sqrt {1-{\\frac {1}{z^{2}}}}}-{\\frac {i}{z}}\\right)&{}=\\arcsin \\left({\\frac {1}{z}}\\right)\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/28cad9ecedf67c8ac8a996fb2cd3caf763eb2dcc)
Because all of the inverse trigonometric functions output an angle of a right triangle, they can be generalized by using [Euler's formula](https://en.wikipedia.org/wiki/Euler%27s_formula "Euler's formula") to form a right triangle in the complex plane. Algebraically, this gives us:

or

where  is the adjacent side,  is the opposite side, and  is the [hypotenuse](https://en.wikipedia.org/wiki/Hypotenuse "Hypotenuse"). From here, we can solve for .

or

Simply taking the imaginary part works for any real-valued  and , but if  or  is complex-valued, we have to use the final equation so that the real part of the result isn't excluded. Since the length of the hypotenuse doesn't change the angle, ignoring the real part of  also removes  from the equation. In the final equation, we see that the angle of the triangle in the complex plane can be found by inputting the lengths of each side. By setting one of the three sides equal to 1 and one of the remaining sides equal to our input , we obtain a formula for one of the inverse trig functions, for a total of six equations. Because the inverse trig functions require only one input, we must put the final side of the triangle in terms of the other two using the [Pythagorean theorem](https://en.wikipedia.org/wiki/Pythagorean_theorem "Pythagorean theorem") relation

The table below shows the values of a, b, and c for each of the inverse trig functions and the equivalent expressions for  that result from plugging the values into the equations  above and simplifying.

The particular form of the simplified expression can cause the output to differ from the [usual principal branch](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#Principal_values) of each of the inverse trig functions. The formulations given will output the usual principal branch when using the ![{\\displaystyle \\operatorname {Im} \\left(\\ln z\\right)\\in (-\\pi ,\\pi \]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/781cef7f2317c18794eeaaddeef4073aadd51b75) and  principal branch for every function except arccotangent in the  column. Arccotangent in the  column will output on its usual principal branch by using the  and  convention.
In this sense, all of the inverse trig functions can be thought of as specific cases of the complex-valued log function. Since these definition work for any complex-valued , the definitions allow for [hyperbolic angles](https://en.wikipedia.org/wiki/Hyperbolic_angle "Hyperbolic angle") as outputs and can be used to further define the [inverse hyperbolic functions](https://en.wikipedia.org/wiki/Inverse_hyperbolic_functions "Inverse hyperbolic functions"). It's possible to algebraically prove these relations by starting with the exponential forms of the trigonometric functions and solving for the inverse function.

Using the [exponential definition of sine](https://en.wikipedia.org/wiki/Trigonometric_functions#Euler's_formula_and_the_exponential_function "Trigonometric functions"), and letting 
![{\\displaystyle {\\begin{aligned}z&={\\frac {e^{i\\phi }-e^{-i\\phi }}{2i}}\\\\\[10mu\]2iz&=\\xi -{\\frac {1}{\\xi }}\\\\\[5mu\]0&=\\xi ^{2}-2iz\\xi -1\\\\\[5mu\]\\xi &=iz\\pm {\\sqrt {1-z^{2}}}\\\\\[5mu\]\\phi &=-i\\ln \\left(iz\\pm {\\sqrt {1-z^{2}}}\\right)\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ed03e8cf773fa44cc78823d65f7d82f41276fb96)
(the positive branch is chosen)

| | | |
|---|---|---|
| [](https://en.wikipedia.org/wiki/File:Complex_Arcsine.svg "Arcsine of z in the complex plane.") | [](https://en.wikipedia.org/wiki/File:Complex_Arccosine.svg "Arccosine of z in the complex plane.") | [](https://en.wikipedia.org/wiki/File:Complex_Arctangent.svg "Arctangent of z in the complex plane.") |
|  | | |
| | | |
|---|---|---|
| [](https://en.wikipedia.org/wiki/File:Complex_Arccosecant.svg "Arccosecant of z in the complex plane.") | [](https://en.wikipedia.org/wiki/File:Complex_Arcsecant.svg "Arcsecant of z in the complex plane.") | [](https://en.wikipedia.org/wiki/File:Complex_Arccotangent.svg "Arccotangent of z in the complex plane.") |
|  | | |
### Finding the angle of a right triangle
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=24 "Edit section: Finding the angle of a right triangle")\]
[](https://en.wikipedia.org/wiki/File:Trigonometry_triangle.svg)
A [right triangle](https://en.wikipedia.org/wiki/Right_triangle "Right triangle") with sides relative to an angle at the  point.
Inverse trigonometric functions are useful when trying to determine the remaining two angles of a [right triangle](https://en.wikipedia.org/wiki/Right_triangle "Right triangle") when the lengths of the sides of the triangle are known. Recalling the right-triangle definitions of sine and cosine, it follows that

Often, the hypotenuse is unknown and would need to be calculated before using arcsine or arccosine using the [Pythagorean theorem](https://en.wikipedia.org/wiki/Pythagorean_theorem "Pythagorean theorem"):  where  is the length of the hypotenuse. Arctangent comes in handy in this situation, as the length of the hypotenuse is not needed.

For example, suppose a roof drops 8 feet as it runs out 20 feet. The roof makes an angle *θ* with the horizontal, where *θ* may be computed as follows:

### In computer science and engineering
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=25 "Edit section: In computer science and engineering")\]
#### Two-argument variant of arctangent
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=26 "Edit section: Two-argument variant of arctangent")\]
The two-argument [atan2](https://en.wikipedia.org/wiki/Atan2 "Atan2") function computes the arctangent of *y*/*x* given y and x, but with a range of (−π, π\]. In other words, atan2(*y*, *x*) is the angle between the positive x\-axis of a plane and the point (*x*, *y*) on it, with positive sign for counter-clockwise angles ([upper half-plane](https://en.wikipedia.org/wiki/Upper_half-plane "Upper half-plane"), *y* \> 0), and negative sign for clockwise angles (lower half-plane, *y* \< 0). It was first introduced in many computer programming languages, but it is now also common in other fields of science and engineering.
In terms of the standard **arctan** function, that is with range of (−π/2, π/2), it can be expressed as follows:

It also equals the [principal value](https://en.wikipedia.org/wiki/Principal_value "Principal value") of the [argument](https://en.wikipedia.org/wiki/Arg_\(mathematics\) "Arg (mathematics)") of the [complex number](https://en.wikipedia.org/wiki/Complex_number "Complex number") *x* + *iy*.
This limited version of the function above may also be defined using the [tangent half-angle formulae](https://en.wikipedia.org/wiki/Tangent_half-angle_formula "Tangent half-angle formula") as follows:  provided that either *x* \> 0 or *y* ≠ 0. However this fails if given *x* ≤ 0 and *y* = 0 so the expression is unsuitable for computational use.
The above argument order (y, x) seems to be the most common, and in particular is used in [ISO standards](https://en.wikipedia.org/wiki/ISO_standard "ISO standard") such as the [C programming language](https://en.wikipedia.org/wiki/C_\(programming_language\) "C (programming language)"), but a few authors may use the opposite convention (x, y) so some caution is warranted. (See variations at [atan2 § Realizations of the function in common computer languages](https://en.wikipedia.org/wiki/Atan2#Realizations_of_the_function_in_common_computer_languages "Atan2").)
#### Arctangent function with location parameter
\[[edit](https://en.wikipedia.org/w/index.php?title=Inverse_trigonometric_functions&action=edit§ion=27 "Edit section: Arctangent function with location parameter")\]
In many applications[\[17\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-18) the solution  of the equation  is to come as close as possible to a given value . The adequate solution is produced by the parameter modified arctangent function

The function  rounds to the nearest integer.
For angles near 0 and π, arccosine is [ill-conditioned](https://en.wikipedia.org/wiki/Ill-conditioned "Ill-conditioned"), and similarly with arcsine for angles near −π/2 and π/2. Computer applications thus need to consider the stability of inputs to these functions and the sensitivity of their calculations, or use alternate methods.[\[18\]](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_note-Gade_2010-19)
- [Arcsine distribution](https://en.wikipedia.org/wiki/Arcsine_distribution "Arcsine distribution")
- [Inverse exsecant](https://en.wikipedia.org/wiki/Inverse_exsecant "Inverse exsecant")
- [Inverse versine](https://en.wikipedia.org/wiki/Inverse_versine "Inverse versine")
- [Inverse hyperbolic functions](https://en.wikipedia.org/wiki/Inverse_hyperbolic_functions "Inverse hyperbolic functions")
- [List of integrals of inverse trigonometric functions](https://en.wikipedia.org/wiki/List_of_integrals_of_inverse_trigonometric_functions "List of integrals of inverse trigonometric functions")
- [List of trigonometric identities](https://en.wikipedia.org/wiki/List_of_trigonometric_identities "List of trigonometric identities")
- [Trigonometric function](https://en.wikipedia.org/wiki/Trigonometric_function "Trigonometric function")
- [Trigonometric functions of matrices](https://en.wikipedia.org/wiki/Trigonometric_functions_of_matrices "Trigonometric functions of matrices")
1. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-13)** The expression "LHS  RHS" indicates that *either* (a) the left hand side (i.e. LHS) and right hand side (i.e. RHS) are *both* true, or else (b) the left hand side and right hand side are *both* false; there is *no* option (c) (e.g. it is *not* possible for the LHS statement to be true and also simultaneously for the RHS statement to be false), because otherwise "LHS  RHS" would not have been written.
To clarify, suppose that it is written "LHS  RHS" where LHS (which abbreviates *left hand side*) and RHS are both statements that can individually be either be true or false. For example, if  and  are some given and fixed numbers and if the following is written:  then LHS is the statement "". Depending on what specific values  and  have, this LHS statement can either be true or false. For instance, LHS is true if  and  (because in this case ) but LHS is false if  and  (because in this case  which is not equal to ); more generally, LHS is false if  and  Similarly, RHS is the statement " for some ". The RHS statement can also either true or false (as before, whether the RHS statement is true or false depends on what specific values  and  have). The logical equality symbol  means that (a) if the LHS statement is true then the RHS statement is also *necessarily* true, and moreover (b) if the LHS statement is false then the RHS statement is also *necessarily* false. Similarly,  *also* means that (c) if the RHS statement is true then the LHS statement is also *necessarily* true, and moreover (d) if the RHS statement is false then the LHS statement is also *necessarily* false.
- [Abramowitz, Milton](https://en.wikipedia.org/wiki/Milton_Abramowitz "Milton Abramowitz"); [Stegun, Irene A.](https://en.wikipedia.org/wiki/Irene_Stegun "Irene Stegun"), eds. (1972). [*Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables*](https://archive.org/details/handbookofmathe000abra). New York: [Dover Publications](https://en.wikipedia.org/wiki/Dover_Publications "Dover Publications"). [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-0-486-61272-0](https://en.wikipedia.org/wiki/Special:BookSources/978-0-486-61272-0 "Special:BookSources/978-0-486-61272-0")
.
1. ^ [***a***](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Hall_1909_1-0) [***b***](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Hall_1909_1-1) [***c***](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Hall_1909_1-2) [***d***](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Hall_1909_1-3)
Hall, Arthur Graham; Frink, Fred Goodrich (Jan 1909). ["Chapter II. The Acute Angle \[14\] Inverse trigonometric functions"](https://archive.org/stream/planetrigonometr00hallrich#page/n30/mode/1up). Written at Ann Arbor, Michigan, USA. *Trigonometry*. Vol. Part I: Plane Trigonometry. New York, USA: [Henry Holt and Company](https://en.wikipedia.org/wiki/Henry_Holt_and_Company "Henry Holt and Company") / Norwood Press / J. S. Cushing Co. - Berwick & Smith Co., Norwood, Massachusetts, USA. p. 15. Retrieved 2017-08-12. "\[…\] α = arcsin *m*: It is frequently read "[arc-sine](https://en.wikipedia.org/wiki/Arc-sine "Arc-sine") *m*" or "[anti-sine](https://en.wikipedia.org/wiki/Anti-sine "Anti-sine") *m*," since two mutually inverse functions are said each to be the [anti-function](https://en.wikipedia.org/wiki/Anti-function "Anti-function") of the other. \[…\] A similar symbolic relation holds for the other [trigonometric functions](https://en.wikipedia.org/wiki/Trigonometric_function "Trigonometric function"). \[…\] This notation is universally used in Europe and is fast gaining ground in this country. A less desirable symbol, α = sin\-1*m*, is still found in English and American texts. The notation α = inv sin *m* is perhaps better still on account of its general applicability. \[…\]"
2. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-cyclometric_2-0)**
[Klein, Felix](https://en.wikipedia.org/wiki/Felix_Klein "Felix Klein") (1924) \[1902\]. *Elementarmathematik vom höheren Standpunkt aus: Arithmetik, Algebra, Analysis* (in German). Vol. 1 (3rd ed.). Berlin: J. Springer.
Translated as
[*Elementary Mathematics from an Advanced Standpoint: Arithmetic, Algebra, Analysis*](https://books.google.com/books?id=8KuoxgykfbkC). Translated by Hedrick, E. R.; Noble, C. A. Macmillan. 1932. [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-0-486-43480-3](https://en.wikipedia.org/wiki/Special:BookSources/978-0-486-43480-3 "Special:BookSources/978-0-486-43480-3")
.
3. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-arcus_3-0)**
[Hazewinkel, Michiel](https://en.wikipedia.org/wiki/Michiel_Hazewinkel "Michiel Hazewinkel") (1994) \[1987\]. [*Encyclopaedia of Mathematics*](https://en.wikipedia.org/wiki/Encyclopedia_of_Mathematics "Encyclopedia of Mathematics") (unabridged reprint ed.). [Kluwer Academic Publishers](https://en.wikipedia.org/wiki/Kluwer_Academic_Publishers "Kluwer Academic Publishers") / [Springer Science & Business Media](https://en.wikipedia.org/wiki/Springer_Science_%26_Business_Media "Springer Science & Business Media"). [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-155608010-4](https://en.wikipedia.org/wiki/Special:BookSources/978-155608010-4 "Special:BookSources/978-155608010-4")
.
Bronshtein, I. N.; Semendyayev, K. A.; Musiol, Gerhard; Mühlig, Heiner. "Cyclometric or Inverse Trigonometric Functions". *Handbook of Mathematics* (6th ed.). Berlin: Springer. § 2.8, pp. 85–89. [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1007/978-3-663-46221-8](https://doi.org/10.1007%2F978-3-663-46221-8) (inactive 1 Jul 2025).
`{{cite book}}`: CS1 maint: DOI inactive as of July 2025 ([link](https://en.wikipedia.org/wiki/Category:CS1_maint:_DOI_inactive_as_of_July_2025 "Category:CS1 maint: DOI inactive as of July 2025")) However, the term "arcus function" can also refer to the function giving the [argument](https://en.wikipedia.org/wiki/Argument_\(complex_analysis\) "Argument (complex analysis)") of a complex number, sometimes called the *arcus*.
4. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-4)**
Weisstein, Eric W. ["Inverse Trigonometric Functions"](https://mathworld.wolfram.com/InverseTrigonometricFunctions.html). *mathworld.wolfram.com*. Retrieved 2020-08-29.
5. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Americana_1912_5-0)**
Beach, Frederick Converse; Rines, George Edwin, eds. (1912). "Inverse trigonometric functions". [*The Americana: a universal reference library*](https://en.wikipedia.org/wiki/The_Americana "The Americana"). Vol. 21.
6. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-6)**
Cook, John D. (11 Feb 2021). ["Trig functions across programming languages"](https://www.johndcook.com/blog/2021/02/11/trig-across-languages). *johndcook.com* (blog). Retrieved 2021-03-10.
7. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Cajori_7-0)**
[Cajori, Florian](https://en.wikipedia.org/wiki/Florian_Cajori "Florian Cajori") (1919). [*A History of Mathematics*](https://archive.org/details/ahistorymathema02cajogoog) (2 ed.). New York, NY: [The Macmillan Company](https://en.wikipedia.org/wiki/The_Macmillan_Company "The Macmillan Company"). p. [272](https://archive.org/details/ahistorymathema02cajogoog/page/n284).
8. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Herschel_1813_8-0)**
[Herschel, John Frederick William](https://en.wikipedia.org/wiki/John_Frederick_William_Herschel "John Frederick William Herschel") (1813). ["On a remarkable Application of Cotes's Theorem"](https://books.google.com/books?id=qpRJAAAAYAAJ&pg=PA8). *Philosophical Transactions*. **103** (1). Royal Society, London: 8. [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1098/rstl.1813.0005](https://doi.org/10.1098%2Frstl.1813.0005).
9. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-9)**
["Inverse trigonometric functions"](https://brilliant.org/wiki/inverse-trigonometric-functions/). Wiki. *Brilliant Math & Science (brilliant.org)*. Retrieved 2020-08-29.
10. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Korn_2000_10-0)**
Korn, Grandino Arthur; [Korn, Theresa M.](https://en.wikipedia.org/wiki/Theresa_M._Korn "Theresa M. Korn") (2000) \[1961\]. "21.2.-4. Inverse Trigonometric Functions". [*Mathematical handbook for scientists and engineers: Definitions, theorems, and formulars for reference and review*](https://archive.org/details/mathematicalhand00korn_849) (3 ed.). Mineola, New York, USA: [Dover Publications, Inc.](https://en.wikipedia.org/wiki/Dover_Publications,_Inc. "Dover Publications, Inc.") p. [811](https://archive.org/details/mathematicalhand00korn_849/page/n828). [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-0-486-41147-7](https://en.wikipedia.org/wiki/Special:BookSources/978-0-486-41147-7 "Special:BookSources/978-0-486-41147-7")
.
11. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Bhatti_1999_11-0)**
Bhatti, Sanaullah; Nawab-ud-Din; Ahmed, Bashir; Yousuf, S. M.; Taheem, Allah Bukhsh (1999). "Differentiation of Trigonometric, Logarithmic and Exponential Functions". In Ellahi, Mohammad Maqbool; Dar, Karamat Hussain; Hussain, Faheem (eds.). *Calculus and Analytic Geometry* (1 ed.). [Lahore](https://en.wikipedia.org/wiki/Lahore "Lahore"): Punjab Textbook Board. p. 140.
12. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-12)**
For example:
Stewart, James; Clegg, Daniel; Watson, Saleem (2021). "Inverse Functions and Logarithms". *Calculus: Early Transcendentals* (9th ed.). Cengage Learning. § 1.5, p. 64. [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-1-337-61392-7](https://en.wikipedia.org/wiki/Special:BookSources/978-1-337-61392-7 "Special:BookSources/978-1-337-61392-7")
.
13. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-14)** [Abramowitz & Stegun 1972](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#CITEREFAbramowitzStegun1972), p. 73, 4.3.44
14. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Borwein_2004_15-0)**
Borwein, Jonathan; Bailey, David; Gingersohn, Roland (2004). [*Experimentation in Mathematics: Computational Paths to Discovery*](https://archive.org/details/experimentationm00borw_656) (1 ed.). Wellesley, MA, USA: [A. K. Peters](https://en.wikipedia.org/wiki/A._K._Peters "A. K. Peters"). p. [51](https://archive.org/details/experimentationm00borw_656/page/n60). [ISBN](https://en.wikipedia.org/wiki/ISBN_\(identifier\) "ISBN (identifier)")
[978-1-56881-136-9](https://en.wikipedia.org/wiki/Special:BookSources/978-1-56881-136-9 "Special:BookSources/978-1-56881-136-9")
.
15. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-16)**
Hwang Chien-Lih (2005), "An elementary derivation of Euler's series for the arctangent function", *The Mathematical Gazette*, **89** (516): 469–470, [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1017/S0025557200178404](https://doi.org/10.1017%2FS0025557200178404), [S2CID](https://en.wikipedia.org/wiki/S2CID_\(identifier\) "S2CID (identifier)") [123395287](https://api.semanticscholar.org/CorpusID:123395287)
16. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-17)**
S. M. Abrarov and B. M. Quine (2018), "A formula for pi involving nested radicals", *The Ramanujan Journal*, **46** (3): 657–665, [arXiv](https://en.wikipedia.org/wiki/ArXiv_\(identifier\) "ArXiv (identifier)"):[1610\.07713](https://arxiv.org/abs/1610.07713), [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1007/s11139-018-9996-8](https://doi.org/10.1007%2Fs11139-018-9996-8), [S2CID](https://en.wikipedia.org/wiki/S2CID_\(identifier\) "S2CID (identifier)") [119150623](https://api.semanticscholar.org/CorpusID:119150623)
17. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-18)** when a time varying angle crossing  should be mapped by a smooth line instead of a saw toothed one (robotics, astronomy, angular movement in general)\[*[citation needed](https://en.wikipedia.org/wiki/Wikipedia:Citation_needed "Wikipedia:Citation needed")*\]
18. **[^](https://en.wikipedia.org/wiki/Inverse_trigonometric_functions#cite_ref-Gade_2010_19-0)**
Gade, Kenneth (2010). ["A non-singular horizontal position representation"](http://www.navlab.net/Publications/A_Nonsingular_Horizontal_Position_Representation.pdf) (PDF). *The Journal of Navigation*. **63** (3). [Cambridge University Press](https://en.wikipedia.org/wiki/Cambridge_University_Press "Cambridge University Press"): 395–417\. [Bibcode](https://en.wikipedia.org/wiki/Bibcode_\(identifier\) "Bibcode (identifier)"):[2010JNav...63..395G](https://ui.adsabs.harvard.edu/abs/2010JNav...63..395G). [doi](https://en.wikipedia.org/wiki/Doi_\(identifier\) "Doi (identifier)"):[10\.1017/S0373463309990415](https://doi.org/10.1017%2FS0373463309990415).
- [Weisstein, Eric W.](https://en.wikipedia.org/wiki/Eric_W._Weisstein "Eric W. Weisstein") ["Inverse Tangent"](https://mathworld.wolfram.com/InverseTangent.html). *[MathWorld](https://en.wikipedia.org/wiki/MathWorld "MathWorld")*. | |||||||||
| ML Classification | ||||||||||
| ML Categories |
Raw JSON{
"/Science": 916,
"/Science/Mathematics": 913,
"/Science/Mathematics/Other": 873
} | |||||||||
| ML Page Types |
Raw JSON{
"/Article": 999,
"/Article/Wiki": 853
} | |||||||||
| ML Intent Types |
Raw JSON{
"Informational": 999
} | |||||||||
| Content Metadata | ||||||||||
| Language | en | |||||||||
| Author | null | |||||||||
| Publish Time | not set | |||||||||
| Original Publish Time | 2013-08-11 01:41:26 (12 years ago) | |||||||||
| Republished | No | |||||||||
| Word Count (Total) | 15,594 | |||||||||
| Word Count (Content) | 5,397 | |||||||||
| Links | ||||||||||
| External Links | 56 | |||||||||
| Internal Links | 350 | |||||||||
| Technical SEO | ||||||||||
| Meta Nofollow | No | |||||||||
| Meta Noarchive | No | |||||||||
| JS Rendered | No | |||||||||
| Redirect Target | null | |||||||||
| Performance | ||||||||||
| Download Time (ms) | 206 | |||||||||
| TTFB (ms) | 94 | |||||||||
| Download Size (bytes) | 99,377 | |||||||||
| Shard | 152 (laksa) | |||||||||
| Root Hash | 17790707453426894952 | |||||||||
| Unparsed URL | org,wikipedia!en,/wiki/Inverse_trigonometric_functions s443 | |||||||||